Lange duurvlucht met elektrische heli:
- Inleiding:
Naar aanleiding van de ontwikkelingen die zich de laatste jaren voordoen op het gebied van radiobestuurde helikopters, en meer bepaald qua efficiëntie van de aandrijving en nieuwe batterij technologie, leek het een mooie uitdaging om eens te bekijken wat er tegenwoordig kan bereikt worden. In het kort gezegd wilden we onderzoeken hoe lang een grote elektrische R/C heli van het gekende “700 formaat” in de lucht kan blijven met de huidige stand van techniek. En dit zonder gebruik van extra batterijen, dus met de normale hoeveelheid lithium polymeer cellen, zoals de heli voor standaard vluchten gebruikt wordt. Alle nutteloos gewicht en onnodig verbruik is zo veel mogelijk vermeden, door gebruik van te maken van een relatief lichte helikopter zonder mechanische “flybar” en zeer lage toerentallen. Alle gebruikte onderdelen (of gelijkaardige) zijn echter makkelijk in de handel verkrijgbaar, zodat dit experiment realistisch kopieerbaar is door iedereen die dit zou wensen. Dus er is geen sprake van speciaal ontwikkelde prototypes of zelfgemaakte exotische onderdelen. Dit is een bewuste keuze geweest, omdat de hele opzet net de bedoeling heeft om aan te tonen wat er tegenwoordig zo al mogelijk is.
- De voorbereiding:
- Het eindresultaat:
- Conclusie:
- Het vervolg ?
De uitwerking het toegepaste materiaal:
Zender/ontvanger:
Zender Spektrum DX8 + ontvanger AR8000 + telemetrie module TM1000 met temperatuursensor op de snelheidsregelaar en spanningssensor op de batterijen. Een optionele toerentalsensor is ook verkrijgbaar, maar deze hebben we niet aangewend omdat het toerental in onze opstelling stabiel gehouden wordt door de governor functie, en zodra het optimale toerental gemeten en vastgelegd was, had verdere monitoring weinig zin.
Helikopter:
- Mikado Logo 600SE, met het standaard glasvezel versterkt polymeer frame. Dit weegt beduidend lichter als het optionele carbon frame. Het toestel mag in combinatie met hoofdbladen tot 690 mm gebruikt worden en toerentallen tot 1800 RPM (fabrikantgegevens). Meestal wordt een 10S tot 12S li-po batterij toegepast.
- Hoofdbladen merk ACT, lengte 660 mm, asymmetrisch + S-profiel. Een alternatief voor deze asymmetrische bladen met hoog rendement is bijvoorbeeld verkrijgbaar bij het merk Spinblades.
- Staartbladen merk MAH Edge 115 mm symmetrisch, wat ongeveer het maximum is voor deze heli. De eerst geteste 105 mm EDGE staartbladen slagen er minder goed in de staart stabiel te houden. Men kan ook asymmetrische exemplaren toepassen. De aandrijving van de staartrotor gebeurt met een klassieke, kevlar versterkte riemaandrijving.
- Snelheidsregelaar Kontronik Jive 80HV+ in governor mode en twee parallelle BEC kabels. Dit type regelaar functioneert soepel bij langdurige en extreem lage throttle instellingen zonder opwarming.
- Motor Kontronik Pyro 700-45, welke een laag gewicht en goede efficiëntie combineert.
- Hoofdtandwiel 106 tanden + motortandwiel 11 tanden, beide van het herringbone type.
- Servo’s Futaba BLS451 X 3 (cyclic) en BLS251 (staart).
- FBL elektronica Mikado V-Bar versie 5.1.8 (zwarte full-size versie).
- Twee Zippy Flightmax li-po 6S/5000mAh 15C maximale ontlading, gewicht/stuk = 715 gram, het totale vliegklaar gewicht bedraagt dan 4,2 kg. Speciale maatregelen:
Speciale maatregelen:
- Uit eerdere metingen blijkt dat er een lineaire relatie bestaat tussen het toerental van de hoofdrotor en het verbruik, dus de vluchttijd. Door verschillende meetvluchten uit te voeren tijdens dewelke het constante toerental en het verbruik geregistreerd werden, werd deze relatie bepaald voor de betreffende helikopter. Hierbij werd geconstateerd dat elke vermindering van het toerental met 100 toeren/minuut ongeveer 1 minuut en 50 seconden extra vluchttijd betekende. Een snel draaiende hoofdrotor vreet energie, en dus was het taak om dit toerental zo laag mogelijk te krijgen, zonder dat het toestel onbeheersbaar zou worden. In praktijk bleek een toerental van 800 RPM nog vliegbaar, mits een aantal bijkomende maatregelen genomen werden, zoals hieronder vermeld.
- Om het toerental laag te houden, werd voor het kleinst verkrijgbare motortandwiel gekozen (11 tanden voor een as van diameter 6 mm), en een motor met een vrij lage KV waarde van 450 KV. Doch dit bleek nog onvoldoende te zijn met de twee 6S batterijen in serie geschakeld. Het laagste bekomen toerental bedroeg iets boven 1200 RPM, en dit met een vlakke gascurve die begrensd was op slechts vijf percent (!). Verschillende opties liggen dan open, zoals het gebruik van een motor met een nog lagere KV waarde of het gebruik van een lager aantal batterijcellen. In deze opzet werd gekozen om simpelweg de standaard 6S batterijen in parallel in plaats van in serie te gebruiken, wat toelaat om zeer lage toerentallen te bereiken zonder grote ingrepen. Het verschil in relatieve efficiëntie tussen de 6S en 12S opstelling bleek verwaarloosbaar klein bij deze kleine stromen, we krijgen in beide gevallen trouwens weinig warmteontwikkeling.
- Bij het vergelijken van het rendement tussen symmetrische en asymmetrische hoofdbladen bij gelijke toerentallen constateerden we gemiddeld een grofweg 10% langere vluchttijd met de asymmetrische bladen. Maar deze laatste bieden nog een ander, veel belangrijker voordeel: door hun hogere lift laten ze lagere toerentallen en dus minder verbruik toe, tot op het punt waarbij symmetrische bladen simpelweg te weinig lift zouden genereren om de heli nog doen op te stijgen.

- Verder is bijvoorbeeld de optionele tegenlager van de motoras verwijderd om gewicht te besparen, deze is immers alleen gewenst bij een extreem harde vliegstijl. We hebben echter wel geopteerd om de kap van de helikopter te behouden tijdens de vluchten, om een enigszins realistische situatie te behouden, en bijvoorbeeld de goede zichtbaarheid in de lucht te behouden op grotere afstand.
- Ook zijn er iets grotere staartbladen als gebruikelijk gemonteerd, om voldoende houdkracht qua staartbesturing over te houden aan lage toerentallen. 95 tot 105 mm is gebruikelijk, we hebben hier een setje van 115 mm gemonteerd.
- De “gain” instellingen van de V-Bar elektronica zijn tevens flink verhoogd, vooral om het gedrag van de staart, en in mindere mate dat van de rotorkop, te verbeteren.
- En uiteraard hebben we getracht om een perfecte mechanische werking te bekomen, door zorgvuldig te bouwen en adequate smering te voorzien. Zoals bijvoorbeeld het overvloedig gebruik van siliconenspray op de staartriem en het invetten van het hoofdtandwiel, naast de klassieke smering van lagers, hoofdas, enz.
- Batterijen met een lage maximale ontladingswaarden (C-waarde) volstaan in deze situatie, dit laat toe om een type met meer capaciteit te kiezen voor eenzelfde gewicht en afmetingen. De gemiddelde stroomopname is zodanig laag (ongeveer 13 A) dat hier haast geen probleem kan ontstaan.
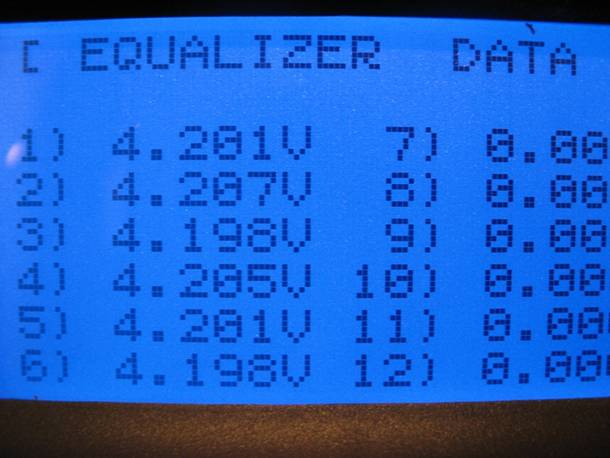
- Het telemetrie systeem, en meer bepaald de aanduiding van de real-time (belaste) spanning van de batterijen op het scherm van de zender, laat toe om de li-po batterijen te ontladen tot net boven de uiterste limiet van 3 Volt per cel indien gewenst.


Het vliegen aan extreem lage toerentallen vraagt enige gewenning, en hier wordt best in stappen naar toe gewerkt. Er is weinig krachtoverschot zoals we gewend (en verwend ?) zijn bij moderne helikopters. Dit vraagt dus een beredeneerde manier van vliegen, in het bijzonder qua manipulatie van de gasstick. Tegelijkertijd wensen we zo economisch mogelijk te vliegen, wat dezelfde vereiste stelt. De asymmetrische bladen, in combinatie met de relatief lichte heli, geven ook meer aanleiding tot het “ballon-effect”: het toestel zal sneller stijgen of dalen ten gevolge van windinvloeden bijvoorbeeld. Er moet opgemerkt worden dat de cyclische reactie vrij goed op peil blijft echter, dit is grotendeels te danken aan de logaritmes in de V-Bar software. Een ander aspect is de verminderde staartwerking, maar door het kleinere koppel van de hoofdbladen en de kleinere beschikbare hoeveelheid resterende pitch is dit probleem niet zo groot als zou gedacht worden.
Een andere zaak is dat het langdurig vliegen nogal veel vergt van de concentratie van de piloot, die dergelijke vluchttijden hoogstwaarschijnlijk niet gewend is. Een aangenaam neveneffect is dat het geluidsniveau drastisch lager ligt als bij hogere toerentallen, wat het vliegen op zich meer ontspannend maakt. En tevens natuurgetrouwer, voor de schaalliefhebbers onder ons.

Aan 800 RPM en met twee 6S/5000mAh batterijen in parallel, met een kalme vliegstijl (type schaalvliegen) in rustig weer:
Tussen het opstijgen en landing werd een tijd gemeten van net iets meer dan 40 minuten.
De snelheidsregelaar startte de vlucht aan 21 °Celsius, en eindigde op 43 °Celsius. Motor en batterijen waren eveneens slechts licht warm.
De batterijspanning onder belasting daalde tot 20,5 Volt op het einde van de vlucht (3,42 Volt per cel). Na herlading van de batterijen met meting van de nodige capaciteit, berekenden we dat de batterijen in theorie voor 93% ontladen waren, zie opmerking hieronder echter. Het gemiddelde verbruik berekend over de volledige duur van de vlucht was 232 mAh/min, en de gemiddelde stroomsterkte 13,95 A, dus net iets meer dan 300 Watt.
Merk op dat we op voorhand de minimale batterijspanning vastgelegd hadden waarbij de vlucht diende te stoppen. Allereerst dienen we te bedenken dat 3,0 Volt de absolute ondergrens is tot waar een lipo cel mag ontladen worden, op straffe van beschadiging. Een kleine veiligheidsmarge bracht ons op 3,2 Volt. Maar het is ook goed mogelijk dat tijdens de vlucht sommige cellen iets sneller in spanning dalen als andere, dus een extra marge van 0,2 Volt bracht ons op ongeveer 3,4 Volt als aangenomen minimum onder belasting. De batterijcapaciteit zou een slechtere referentie zijn, aangezien dit slechts een gemiddelde indicatie is van de fabrikant, en de werkelijke capaciteit nogal flink kan afwijken. Wat zeer waarschijnlijk het geval is met de gebruikte batterijen, vermoedelijk hebben die een hogere capaciteit, afgaande op de resultaten.
Met relatief weinig ingrepen wordt het mogelijk om vluchttijden te halen die enkele jaren geleden nog ondenkbaar waren met grote elektrisch aangedreven helikopters in standaarduitvoering.
Lichte materialen, krachtiger lithium polymeer batterijen, asymmetrische hoofdbladen, geavanceerde elektronica en aangepaste instellingen dragen allemaal hun steentje bij aan het eindresultaat. Opmerkenswaardig is dat deze evolutie verre van stil staat, zeker op het vlak van batterij technologie.
De extreem lage toerentallen die tijdens deze test gebruikt zijn hebben weliswaar een grote invloed op de vliegeigenschappen, maar het toestel blijft beheersbaar, en met licht hogere toerentallen kan er reeds steviger doorgevlogen worden, terwijl de vluchttijden nog steeds respectabel blijven. In dagelijkse configuratie kan er bijvoorbeeld aan 1500 RPM gedurende 15 tot 20 minuten rustig gevlogen worden, zonder de batterijen overdreven ver te ontladen. Er wacht de elektrische tak van de R/C helikopter hobby nog een zeer mooie toekomst.
Degenen die nu denken dat dit resultaat makkelijk bijna te verdubbelen valt door bijvoorbeeld een tweede set extra batterijen nogmaals parallel te schakelen aan de twee bestaande batterijen, dus een 6S4P opstelling, moet ik jammer genoeg deels ontgoochelen. We hebben de proef op de som genomen, en middels een zelfgemaakte houder die onder het frame en tussen het landingsgestel bevestigd was, inderdaad twee extra batterijen gemonteerd:

Deze testvlucht toonde echter slechts een relatief kleine verhoging van de vluchttijd, en een veel minder handelbare helikopter. De oorzaken zijn dat er reeds een hoger toerental nodig is om de 1,5 kg extra gewicht van de grond te krijgen, in de praktijk minstens 900 RPM in plaats van 800 RPM, en ook dat het extra gewicht een hoger verbruik op zich meebrengt. Bij gebruik van een 6S4P opstelling met vier 6S/4500mAh batterijen, dus eigenlijk 6S/18000mAh, wat dus 80% meer capaciteit is als de vorige 6S/10000 mAh opstelling, bleek de resulterende vluchttijd amper boven de 50 minuten uit te stijgen. Bij vergelijkbare batterijen in beide gevallen, dus 100% meer capaciteit, zou dit een ongeveer 35-40% langere vluchttijd betekenen als de gehaalde 40 minuten. Het hele concept wordt hier dus eigenlijk deels mee tenietgedaan. Goed om weten, voor elk toestel zal er dus wel een optimum bestaan tussen toerental, gewicht, handelbaarheid en vliegtijd.
(geschreven door Raf Vertongen)
Basiscursus 5: Balanceren en “tracking” van helikopterbladen:(geschreven door Raf Vertongen)
Inleiding:
Er zijn een massa zaken die in het oog moeten gehouden worden bij een afstandsbediende helikopter vooraleer het model goede vliegeigenschappen zal vertonen.
Een wel heel essentieel aandachtspunt hierbij is de balans van de hoofdbladen, en ook het feit of de bladen wel degelijk netjes in het zelfde vlak draaien tijdens de vlucht. Dit laatste wordt ook wel eens “tracking” genoemd, verwijzend naar het spoor dat de bladen volgen. Een model dat hier niet aan voldoet zal last krijgen van ongewenste trillingen, met alle gevolgen van dien zoals snellere slijtage, onstabielere vlucht, nerveus gedrag, de gyro die van slag raakt en dus een slechte staartwerking, hoger verbruik, enzovoort.
Daarom dat we dit hier willen toelichten, het is relatief eenvoudig en zonder kosten af te regelen, maar wordt te vaak vergeten of onderschat.
1. Balanceren:
Voor een perfecte dynamische balans van de bladen ten opzichte van elkaar dienen er eigenlijk twee voorwaarden vervuld te zijn: beide bladen moeten precies even zwaar zijn, en het middelpunt van hun massa moet op dezelfde plaats liggen, bekeken langs de lengte-as. Sommigen zullen dit laatste een overdreven maatregel vinden, en zich tevreden stellen met eenzelfde gewicht. Het kan in elk geval geen kwaad om het ineens zo perfect mogelijk te doen, naar mijn bescheiden mening. Dus behandel ik toch maar de hele procedure, zeker daar het ene aspect invloed kan hebben op het andere.
Het idee is om er eerst voor te zorgen dat het massa middelpunt van de beide bladen precies op dezelfde plaats ligt, en pas nadien met kleine correcties er voor te zorgen dat de beide bladen evenveel wegen, hetgeen de massamiddelpunten niet zal verstoren indien de methode hieronder wordt gevolgd. Indien we dit in omgekeerde volgorde zouden doen, zal de balans weer verstoord worden door het corrigeren van het massamiddelpunt !
Opmerkingen: bladen die deze procedure niet ondergaan hebben zullen ook moeilijker te corrigeren zijn qua tracking achteraf. En geloof niet te vlug de verhalen van de fabrikanten, zelfs dure kwaliteitsbladen zijn niet altijd perfect gebalanceerd. Hou in elk geval bladen van dezelfde set bijeen, deze zullen veel beter samen passen als bladen uit verschillende sets !
De praktijk dan:
a) Middelpunten massa:
Hiervoor hebben we een vast voorwerp nodig met een scherpe opstaande rand. Ik neem dikwijls bijvoorbeeld een groot keukenmes hiervoor, type slagersmes. Dit kan op zijn rug gelegd worden op een tafel met de snijkant naar boven gericht, vooropgesteld dat er een geschikt handvat aan zit dat goed op de tafel rust. Neem nu een willekeurig hoofdblad, en leg het dwars op de messnede, zodat het blad precies balanceert. Doe dit door het blad aan beide zijden met een vinger te ondersteunen, en zachtjes los te laten ter controle. We zullen kleine verschuivingen van het hoofdblad moeten doen om het exacte balanspunt te vinden. Neem nu een zacht en fijn potlood, en duid het juiste balanspunt aan, dit is gewoon de plaats waar het blad op de scherpe kant van het mes rust.

Doe hetzelfde met het andere hoofdblad, of alle andere bladen bij een kop met meer dan 2 bladen. Leg nu de bladen tegen over elkaar, uiteraard met de buitentippen aan dezelfde kant. We zullen nu zien dat onze markeringen niet op dezelfde plaats zitten, dus de massamiddelpunten van de bladen zijn niet gelijk. Neem het blad waarvan het massamiddelpunt het dichtst bij de kant van de bladhouder van de heli zit, dus de kant waar zich de boutopening bevindt. Dit massamiddelpunt gaan we nu naar de buitenkant brengen door aan de verste tip van dit blad een gewicht in de vorm van een strookje speciale bladkleefband aan te brengen, dwars over het blad op een paar centimeter van het uiteinde. Op de foto hierboven is dit het rode strookje. Gebruik geen gewone elektriciteitstape, de lijm hiervan wordt te week bij warmte, en de tape zal verschuiven door de grote middelpuntvliegende krachten. Geschikte tape wordt dikwijls meegeleverd met de bladen, maar is ook los verkrijgbaar in modelbouwwinkels. Het is nu goed mogelijk dat we teveel of te weinig tape hebben aangebracht, dus controleer het massamiddelpunt opnieuw zoals hierboven beschreven, vergelijk met het andere blad, en snij een stukje tape weg of breng een groter stuk aan naargelang het geval. Dit totdat beide massamiddelpunten precies op dezelfde afstand van het begin (of einde) van de bladen liggen.
b) Balanceren:
Na gaan we beide bladen ten opzichte van elkaar balanceren, zodat ze het zelfde gewicht zullen hebben. Hiervoor kan je een speciale “blade balancer” kopen, maar het kan ook met eenvoudige hulpmiddelen. Ik gebruik vaak een lange bout M3 of M4, naargelang de diameter van de opening voor de bevestigingsbout in de bladen. Ook heb je 2 platte rondsels en moeren nodig. Leg beide bladen op tafel in een rechte lijn, met de boutopeningen in het midden en over elkaar, en waarbij de aanvalszijden van de bladen naar dezelfde richting wijzen. Steek nu de bout door de beide openingen, breng rondsels aan om de bladen te beschermen, en draai het geheel zo hard vast met de moeren dat de bladen niet meer bewegen ten opzichte van elkaar. Controleer of de bladen netjes 1 rechte lijn vormen door ze met de scherpe kant op het tafelblad te houden, corrigeer indien nodig. De bout steekt nu een flink eind uit aan beide kanten. Laat die uitstekende delen rusten op 2 even hoge stukjes glad hout, speelgoedblokjes of dergelijke, en wel zodat de bladen niet op de tafel of vloer steunen.

We zullen constateren dat de hele constructie steeds naar 1 zijde overhelt. Uiteraard is dit de zwaarste kant, en bijgevolg willen we nu het lichtste blad verzwaren tot we een goeie balans krijgen. Dit doen we door tape aan te brengen op dit lichtste blad, maar nu wel precies in het ma ssamiddelpunt dat we eerder al hadden afgetekend, zodat we dit niet terug verstoren ! Breng een strook tape aan, controleer, en snij stukjes weg of breng meer tape aan zoals nodig. Klaar. Nu hebben we 2 bladen die perfect in balans zijn, dus evenveel wegen, en waarvan ook de massamiddelpunten precies op een zelfde afstand zitten, dit garandeert een perfecte loop. Merk op dat het de moeite kan lonen om dit ook met staartbladen te doen, hier kan het volstaan om ze enkel te balanceren ten opzichte van elkaar.
2. Tracking:
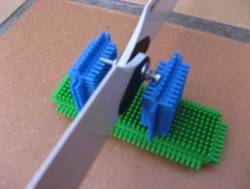
Nu kunnen we onze bladen monteren op de helikopter, maar niets garandeert dat ze mooi in eenzelfde vlak zullen draaien, daar de afregeling van de kop lichtjes kan afwijken aan beide kanten, zelfs bij een zeer nauwkeurig gemonteerde kop (wat uiteraard voorafgaandelijk dient gebeurd te zijn). Dit kunnen we constateren door de heli aan te schakelen, en genoeg gas te geven zodat de heli net niet van de grond komt, terwijl we al liggend naar de platte schijf kijken die gevormd wordt door de snel draaiende bladen. Als je hulp hebt kan je ook de heli in een stabiele zweefvlucht brengen op ooghoogte, en iemand anders aandachtig laten kijken naar de bladen. Ideaal is als we slechts 1 lijn kunnen zien, zoals bij de heli op deze foto:

Als we twee duidelijk onderscheiden lijnen boven elkaar zien aan de tippen van de bladen, wil dit zeggen dat 1 blad hoger draait als een ander. In de volgende figuur zie je bovenaan een goede tracking, en onderaan een afwijkende tracking:
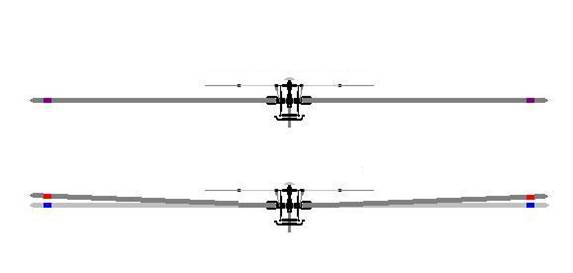
Je kan nu markeringen met alcoholstift in verschillende kleuren aanbrengen op de uiteinden van de bladen om uit te vinden welk blad hoger draait als het andere, want dit zal voor twee kleurcirkels zorgen bij draaiende bladen zoals hierboven. Waarbij je kan zien welke kleur het hoogst zit, nadien proberen uitvissen welke ballink je moet inkorten of verlengen, enzovoort. Maar er is ook een eenvoudiger manier: kies een willekeurig blad en markeer het met een stift, een kleine markering is genoeg. Zoek nu de bijhorende LANGE ballink in de kop die dit blad aanstuurt, dus van tuimelschijf naar de mixerarmen toe, niet de korte link tussen de mixerarm en de bladhouder ! (in het geval van een heli zonder flybar is dit de lange ballink tussen tuimelschijf en bladhouder). Maak 1 zijde los hiervan, verleng deze met 1 volledige draai van 360 graden, en controleer opnieuw met een testvlucht. Indien het resultaat slechter is, dus de afstand tussen de twee zichtbare bladschijven is vergroot, stop dan en verkort dezelfde link. Herhaal tot het resultaat perfect is. Pas steeds dezelfde link aan, daarom dat we 1 blad gemarkeerd hebben, of je gaat de hele kop op den duur ontregelen qua pitch instellingen !
Proficiat, je hebt nu een stel perfect gebalanceerde hoofdbladen die bovendien ook een juiste tracking hebben. Als je problemen ondervindt met de tracking, en je krijgt dit niet goed, dan zijn er vermoedelijk andere problemen aan de orde. Zoals mechanische problemen of overdreven speling in de kop. Merk op dat het soms niet lukt om de tracking perfect te krijgen ondanks een goed gebouwde heli, maar meer dan een millimeter tussenafstand of zo mag dit toch niet bedragen bij goede bladen. Je zal merken dat de heli iets rustiger en preciezer vliegt, en dat de bladen een mooier en egaler geluid voortbrengen.
Veel succes gewenst !
Cursus: servos, zenders, pulsbreedte en pulsfrekwentie. (geschreven door Raf Vertongen)
Heb je jezelf ooit vragen gesteld over al deze dingen, maar nooit de moeite gedaan om er iets meer over te weten te komen ? Concreet bijvoorbeeld in verband met:
- Analoge en digitale servos ?
- Servos werkend op hogere elektrische spanningen?
- Borstelloze en kernloze servo motors ?
- 50 Hertz en tot 333 Hertz frame snelheid servos ?
- 1520 en 760 microseconde pulsebreedte servos ?
- Radio frame snelheden zoals de Futaba 7 - 14 ms specificaties, en Spektrum 11 - 22 ms ?
Het kan een goed idee zijn om er iets meer over te weten, vermits deze technologie snel opmars maakt. “Ja, maar dit klinkt nogal ingewikkeld, ik ben niet echt geïnteresseerd.” OK, geen probleem, maar zou je er nog altijd zo over denken als je net een dure 760 µs staartservo opgebrand hebt omdat je niet de juiste frame snelheid in je gyro geprogrammeerd hebt vooraleer die aan te sluiten ? Of nadat je de verkeerde servo gekocht hebt voor het beoogde doel ? Of nadat je ontdekt dat je eigenlijk je elektronica niet op hun maximale mogelijkheden gebruikt ?
Wel, goed nieuws dan, het is eigenlijk niet zo moeilijk om te begrijpen, en het houdt allemaal een beetje verband met elkaar. Maar het was nogal moeilijk om 1 enkel document te vinden dat tracht het hele verhaal van begin tot einde te vertellen op een eenvoudige manier, dus hier komt mijn poging daartoe:
1) Basiskennis servos:
De servo is verbonden met de ontvanger met een kabel met drie aders: de twee meest voorkomende kleurenschemas van deze drie aders zijn deze van Futaba en JR, welke onderling compatibel zijn, maar een verschillende kleurcode gebruiken:
JR - Signaal=Oranje, Positief=Rood, Negatief=Bruin
Futaba - Signaal=Wit, Positief=Rood, Negatief=Zwart
Hier zie je de meest voorkomende kleurenschema’s:
Er is niets geheimzinnigs aan de + en – aansluitingen: ze verbinden eenvoudigweg, via de ontvanger, de voedingspanning, en ze dragen geen stuursignalen. De meeste servos werken op een voedingspanning van 4,8 tot 6 Volt, sommige zelfs tot 8 Volt tegenwoordig, en je moet steeds oppassen dat jouw servos overweg kunnen met de hoogte van de spanning van de ontvangerbatterij of uitgangspanning van de BEC in je model.
De derde ader (wit of oranje meestal) vervoert het stuursignaal, en dus de informatie komende van de ontvanger, hetwelk de servo beveelt in welke positie hij precies moet staan. Dit gebeurt door een systeem dat gekend is als Puls Breedte Modulatie (PBM). Later meer hierover.
Aan het einde van de kabel bevindt zich een ‘Z-connector’ die je in de ontvanger kan steken. De Futaba versies van deze connector hebben een extra plastic lipje aan de zijkant, wat ervoor zorgt dat je de kabel niet omgekeerd kan inpluggen. JR en Spektrum doen dit niet, wat betekent dat als je een Futaba servo op een JR/Spektrum ontvanger wil aansluiten, je eerst het plastic lipje van de servodraad zal moeten verwijderen. Een nuttige eigenschap van de -/+/signaal volgorde van de aders is dat als je per ongeluk een connector omgekeerd inplugt er geen schade ontstaat. Bij de servo die gebruikelijk zijn in de modelbouw hobby, is de beweging van de servo armen gewoonlijk iets meer dan 90 graden.
2) Puls breedte modulatie:
Het is niet echt nodig om de interne werking van een servo te begrijpen, maar het is wel nuttig om te verstaan hoe signalen van de ontvanger de positie van de servo kunnen bepalen. Zoals de naam laat veronderstellen komt de plaatsbepalende informatie van de ontvanger in de vorm van elektrische pulsen die variëren in lengte. Niet in hoogte, want de hoogte van de puls is simpelweg dezelfde als de gebruikte voedingspanning.
Heel eenvoudig gezegd: de signaalvoerende ader is normaal gesproken intern verbonden met de negatieve voedingspanning, maar gedurende een fractie van een seconde zal deze door de ontvanger verbonden worden met de positieve voedingspanning. Deze verandering in spanning is gekend als een “puls”. De servo voelt de duurtijd (of lengte als je wil) van deze puls, en gebruik makend van zijn interne elektronica zal de servo de motoras in de bijpassende positie plaatsen.
De lengte van een standaard puls voor veel voorkomende servos varieert van 1,0 tot 2,0 milliseconden (ms). Hier kan 1,0 ms betekenen dat de servo arm bijvoorbeeld volledig naar rechts staat, bij 1,0 ms volledig naar links en bij 1,5 ms zal de servo gecentreerd zijn. Servos laten echter een groter bereik qua beweging toe dan dit, en de instellingen van de zender zullen meestal toelaten om het pulsbreedte bereik uit te breiden van 0,7 tot 2,3 ms of zelfs meer.
3) Puls frequentie:
De pulsen komen uit de ontvanger aan een snelheid van 50 pulsen per seconde, in andere woorden 1 puls per 20 milliseconden. Dit interval is gekend als de “frame snelheid” of “puls herhaling snelheid”, en dit bepaalt de snelheid waarmee verschillende positiebepalende instructies aan de servo kunnen doorgegeven worden. Verwar dit niet met de lengte van 1 enkele puls, zoals hierboven beschreven is. Onthoud, elk 20 ms frame bevat 1 puls met een lengte van 1 tot maximaal 2 ms (in de meest voorkomende gevallen). Tussen haakjes, de exacte frame snelheid is niet echt kritisch voor de servo, maar de pulsbreedte wel, aangezien dit heel precies de positie van de servo arm bepaalt.
Het is zoals iemand die naast je zit in de wagen, en die je herhaaldelijk beveelt om aan een snelheid van precies 50 km/uur te rijden. De grootste precisie zal niet worden veroorzaakt door hoeveel keer per minuut deze persoon de instructie herhaalt, maar wel door dat de persoon heel precies “50 km/uur” vermeld. Zo ook met de servo: de pulsbreedte is zijn referentie, niet de frames die de puls vervoeren, en dewelke aan een specifieke maar niet zo kritische snelheid verschijnen. Ik zeg wel degelijk “niet zo kritisch”, omdat er toch wel voordelen verbonden zijn aan een hogere frame snelheid: als een servo een groter aantal keer per seconde bevolen wordt om zijn positie aan te houden, dan zal de servo minder tijd hebben om weggetrokken te worden van zijn positie door uitwendige krachten, en zal dus zijn positie preciezer aanhouden wanneer er grote uitwendige krachten optreden.
Het elektrisch signaal en de bijhorende posities van de servo arm zien er als volgt uit, voor de gebruikelijke servos:
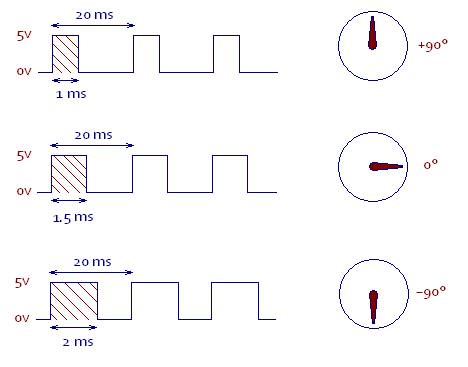
Je kan duidelijk zien dat we hier 5 Volt voedingspanning toepassen, en dat de pulsbreedte varieert van 1 naar 2 ms voor de meest extreme posities van de servo arm, terwijl de frame snelheid altijd ongewijzigd blijft, 20 ms in dit geval. Wat dus 50 frames (en evenveel korte pulsen) per seconde betekent. Duidelijk ?
Voor de volledigheid, hier zie je een diagram van een servo:
(de positie sensor is eigenlijk gewoon een potentiometer, en een gekende oorzaak van problemen met servos)
Een voorbeeld:
De ontvanger in een radiobestuurd vliegtuig zend een constante serie van pulsen naar de roerservo. De roerstick op de zender van de piloot staat in het midden, wat betekent dat elke 1/50ste van een seconde de ontvanger een 1,5 ms puls naar de roerservo stuurt. Net nadat de servo een puls ontvangen heeft, duwt de piloot de roerstick naar links wat betekent dat de volgende puls een lengte zal hebben van, laat ons zeggen 1,25 ms. De servo zal deze puls echter pas 1/50ste van een seconde later krijgen, want dat is de tijd die hij moet wachten op deze volgende puls.
Het verzenden van een puls elke 1/50ste van een seconde (dus elke 20 ms) kan snel lijken, maar het is toch niet snel genoeg voor sommige toepassingen. Bijvoorbeeld bij ultra snelle servos zoals gebruikt voor de staart van een 3D helikopter, die in plaats van verbonden te zijn met de ontvanger, rechtstreeks met de gyro verbonden worden. Deze speciale “superservos” (b.v. de Futaba S9251) worden aangestuurd door speciale gyros (zoals de GY601/611) aan een veel hogere frame snelheid, bijvoorbeeld 333 keer per seconde (dus elke 3 ms).
Omdat deze signalen dus zo snel van de gyro naar de servo worden gestuurd, is er geen tijd genoeg meer om een standaard puls in dit korte frame te krijgen. Het signaal zou anders nog “hoog” zijn als het al tijd zou zijn om een volgende puls te zenden. Dus de fabrikanten hebben de puls breedte verkleind tot een interval tussen 0,5 en 1,0 ms.
Opmerking: om schade te voorkomen mogen servos gemaakt voor de standaard frame rate nooit gebruikt worden met “superservo” componenten, en omgekeerd.
Dus een hogere frame snelheid verbetert de latentie, hetwelk de tijd is die het systeem nodig heeft om op een wijziging van stickpositie te reageren.
In feite zijn er hoofdzakelijk twee eigenschappen die de bewegingsnelheid van een servo beïnvloeden:
- De snelheid waarmee de servomotor de arm kan ronddraaien. Fabrikanten meten en publiceren gewoonlijk de tijd die nodig is voor de servo om de arm 60 graden te draaien.
- Dit bevat echter niet de tijd die de servo nodig heeft om het feit te herkennen dat hij moet beginnen met draaien. Zoals we gezien hebben is dit gelimiteerd door de frequentie van deze pulsen (frame snelheid !). Het kan ongeloofwaardig lijken dat de gewenste servopositie elke 3 ms moet gecommuniceerd worden, maar het kan een merkbaar verschil maken in veeleisende situaties. Merk op dat een deel van de latentie ook veroorzaakt wordt door de vertraging tussen ontvanger en zender maar dat is een ander verhaal…. Om de latentie te verkleinen kunnen sommige moderne zenders/ontvangers werken aan een hogere interne frame snelheid, en dus pulsen sneller naar de servos zenden. Bijvoorbeeld de Spektrum DX7SE of DX8 welke werken aan 11ms / 90Hertz, bijna tweemaal de snelheid van normale radio’s. Er komt meer en meer apparatuur op de markt die afwijkt van de “oude” 50 Hertz standaard, en daarom is belangrijker dan ooit om er voor te zorgen dat servos weloverwogen worden gekozen, zodat ze goed passen bij de verbonden radio apparatuur.
4) Soorten servos:
We hebben al gesproken over de snelheid van servos, maar er zijn vele andere eigenschappen die de prestaties en kostprijs van een servo bepalen.
Er is bijvoorbeeld het koppel dat de servo kan leveren. Dit is de maximale draaiende kracht die kan ontwikkeld worden net voordat de servo geblokkeerd raakt, welk gemeten en uitgedrukt wordt in verschillende (soms weinig wetenschappelijke) eenheden zoals ounce-inches, kilogram-centimeter of Newton-centimeter.
Een andere ontwikkeling die we de laatste jaren gezien hebben is de digitale servo. Analoge types controleren de positie van de motoras slechts elke keer als er een puls van de ontvanger binnenkomt, dus elke 20 ms, en zenden zelf pulsen naar de motor aan hetzelfde tempo. Digitale servos gebruiken een interne microprocessor om de positie van de motoras te controleren en zenden pulsen veel sneller wat resulteert in een betere resolutie, houdkracht en acceleratie. De enige nadelen zijn dat digitale servos meer kosten en meer verbruiken.
Sommige servos hebben motors met superieure prestaties om hogere snelheden of betere betrouwbaarheid te bereiken. Een voorbeeld is de kernloze motor waar het gewicht van het armatuur (het deel dat beweegt) veel verkleind is door de zware stalen kern te elimineren. Het resultaat is een sterkere motor die soepeler en constanter draait. Futaba heeft als eerste een servo geïntroduceerd met een borstelloze motor, een technologie die belooft om veel betrouwbaarder te zijn als oudere ontwerpen.
5) De conclusie van het hele radio - servo verhaal in een notendop:
Laat ons een vertrouwd voorbeeld nemen, zoals de Spektrum DX6 of DX7 radio. Deze heeft een frame snelheid van 22 ms. Opmerking: de DX7SE en DX8 kunnen ook op 11 ms werken, typische Futaba radios werken op 14 en 7 ms frame snelheden.
In dit voorbeeld is 1 frame precies 22 ms lang, wat betekent dat de radio elke 22 ms een frame zend, wat ongeveer 1/0,022 = 45 frames per seconde betekent naar een aangesloten servo. Zoals we hierboven gezien hebben, bevat elk frame van 22 ms precies 1 puls, met een lengte ruwweg variërende tussen 1 en 2 ms, en dit voor een normale servo die centreert op een 1, 52 ms brede puls. Inderdaad, dit is de middelste positie van de servo arm, precies tussen 1 en 2 ms, daarom dat we dit ook een 1520 µs servo noemen.
Analoge en digitale servos kunnen goed overweg met deze relatief lage frame snelheid, maar sommige digitale servos zijn in staat om veel meer frames per seconde te verwerken, tot 333 frames zelfs. Bijvoorbeeld de Futaba BLS251. Deze werken echter nog altijd goed met een lagere frame snelheid. Het verzenden van frames aan een tempo van 333 frames per seconde betekent dat elk frame slechts 3 ms lang kan zijn in plaats van de gebruikelijke 20 ms, wat dus amper genoeg tijd overlaat om de “normale” 2 ms lange puls te bevatten ! Het is om deze reden dat fabrikanten smallere pulsen beginnen gebruiken in zo een geval, zoals degene gebruikt in de 760 µs servos. Deze pulsen zijn ruwweg tussen 0,5 en 1 ms lang. En inderdaad, naar analogie van daarnet, is de middelste positie van deze servos is 0,76 ms, precies tussen 0,5 en 1 ms, daarom de naam 760 µs servo.
Maar maak geen vergissing, zelfs heel snelle systemen zoals de 7 ms Futaba zenders kunnen slechts 1/0,007 = 143 frames per seconde verzenden, ze kunnen dus nog altijd niet de maximaal toegelaten frame snelheid van deze 333 Hz hoogwaardige digitale servos ten volle benutten ! Dit is een reden waarom er nog geen cyclische 760 µs servos bestaan, het heeft gewoon niet echt zin, de meer gebruikelijke 1520 µs servos presteren even goed in deze situatie. Maar sommige hoogwaardige gyros zijn WEL in staat om frames met voldoende hoge snelheid naar een aangesloten servo te sturen, daar de gyro volledige communicatie heeft met, en controle over, de staartservo. Zonder dat de ontvanger roet in het eten gooit. Daarom dat we dus wel deze 760µs / 333 Hz staartservos zien verschijnen.

Er is nog veel meer te zeggen, elektronica experts zouden nog een massa informatie kunnen toevoegen, bijvoorbeeld over 1024 en 2048 bit resolutie van zenders, en dan is er nog al de commerciële verkoopspraat maar kleine bruikbare voordelen van sommige van deze technologieën in onze alledaagse realiteit. Ik hoop echter dat bovenstaande toch de meest essentiële kennis bundelt. Misschien allemaal een beetje ingewikkeld op het eerste zicht, maar hopelijk verduidelijkt het toch een paar dingen.
Raf Vertongen.
Basiscursus: zelf je elektronica uitkiezen voor een helikopter kit.(Raf Vertongen, 3 juni 2011)
Vele modelbouw helikopterkits worden verkocht zonder elektronische componenten, en op dat moment begint de moeilijke taak om zelf de juiste onderdelen te kiezen voor dat model. Deze gids probeert deze taak een beetje makkelijker te maken.
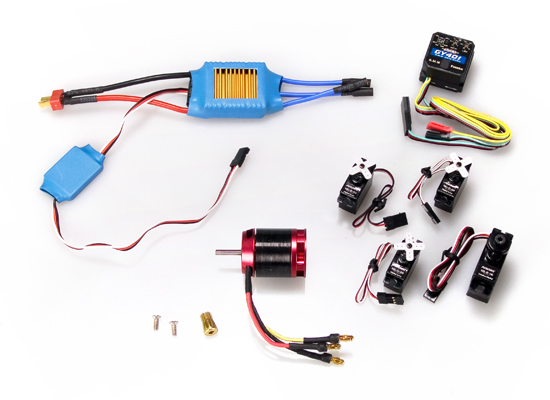
Meestal zijn er ontelbare mogelijkheden, wat de zaken bemoeilijkt en verwarrend maakt. Het is onmogelijk om alle mogelijkheden te behandelen, maar we zullen trachten om een aantal algemene richtlijnen toe te lichten, samen met een bruikbare methode om ze toe te passen. Maar alleen in verband met het uitkiezen van de componenten, niet het inbouwen in de helikopter. Alle theorie achter deze componenten uitleggen is ook een gigantisch werk, en daar zullen we dan niet te diep op ingaan. In het kort, dit is een beknopte start zodat je weet hoe je het probleem kan beginnen aanpakken, zodat beginners hiermee verder kunnen. We gaan ook niet discuteren over merken en kwaliteit, alleen technische kenmerken en de ideeën erachter. Ik zal trachten om je doorheen een lijst van zaken te begeleiden die je nodig hebt, en hoe je kan te weten komen wat je precies nodig hebt, hier gaan we dan:
- Waar starten we ? Laat ons eerst kijken welk formaat heli we in onze handen hebben. Misschien een 250, 450, 500, 600 of 700 ? Dit zijn een aantal veel voorkomende formaten. Dit is belangrijk voor een groot aantal redenen. Onthou het formaat, en ga naar stap 2, makkelijk tot nu toe, niet ? J
- De eerste reden waarom het formaat belangrijk is omdat we moeten weten welk toerental van de hoofdbladen (RPM) we wensen te bereiken, en dat hangt heel erg van de grootte af. Maar waarom eerst focussen op dat toerental ? Wel, dit heeft gevolgen voor sommige kenmerken van de motor en bijhorend tandwiel, welke op hun beurt de kenmerken van de benodigde regelaar kunnen beïnvloeden, het ene heeft later invloed op het andere. De makkelijkste, maar niet erg wetenschappelijke, manier om een geschikt toerental te bepalen voor je heli is om even rond te kijken in clubs of op het internet, en te kijken wat anderen gebruiken, en vragen te stellen over hun vliegstijl. Ervaring is belangrijk op dit gebied. Een hele ruwe richtlijn is deze, afhankelijk of je eerder wil sportvliegen met lagere toerentallen of harde 3D wil vliegen aan hogere toerentallen:
- De volgende zaak is om de spanning (Volt) te bepalen op dewelke je de motor wil laten draaien, veel hangt af van de plaats die je hebt voor de batterijen in je heli. Kijk hiervoor ook naar punt 7). Vele combinaties zijn mogelijk, enkele veel voorkomende waarden zijn deze:
- Nu dat we de spanning bepaald hebben kunnen we eindelijk een geschikte motor kiezen voor deze spanning, en die ook qua afmetingen in de heli past. En de motor moet qua vermogen (Watt) ontworpen zijn voor het specifieke formaat heli dat je beoogt. Deze data worden duidelijk meegegeven door de fabrikant. Maar je moet ook de KV-waarde bekijken (= toeren per minuut per volt batterijspanning). Hoe berekenen we dit ? Het aantal tanden van het hoofdtandwiel voor een welbepaalde heli ligt meestal vast, en je kan makkelijk te weten komen welke pinions er verkrijgbaar zijn voor dat type en diameter van motoras. Kijk eens rond in webwinkels om een idee te krijgen. Onthou dat een lager aantal tanden op de pinion beter is, voor de totale efficiëntie van het systeem.
- Hierna moeten we kijken naar hoeveel stroom (Ampère) de motor kan trekken. Laat ons bijvoorbeeld kijken naar de welbekende Scorpion 2221-8 motor voor een 450 heli. Dit is een 475 Watt motor, op 3S trekt die maximaal 45 ampère, zoals vermeld op de website van de fabrikant. Als je enkel het vermogen (Watt) weet, en je kan geen informatie vinden over de stroom (Ampère), deel dan eenvoudig het vermogen door de nominale spanning om ruwweg de stroom te bekomen. In ons voorbeeld is dit: 475 Watt / 11,1 Volt = 42,8 Ampère, dat is niet ver ernaast. Zoek nu naar een heli snelheidsregelaar (ESC = Electronic speed Controller) die deze stroom en spanning aankan. Bij voorkeur zelf iets meer stroom, om aan de veilige kant te zijn. Dergelijke regelaar moet minstens een goede softstart hebben (niet alle regelaars hebben dit…) en de mogelijkheid om de eventueel aanwezige motorrem volledig af te zetten. Een “governor” instelling is optioneel, dit laat toe om automatisch eenzelfde toerental te verkrijgen tijdens de hele vlucht, onafhankelijk van de dalende batterijspanning en wisselende motorbelastingen. Niet zo belangrijk voor beginners. Een programmeerinterface voor de regelaar is ook optioneel, daar de de meeste regelaars kunnen geprogrammeerd worden met behulp van de zendersticks.
- Je hebt ook een BEC (= Battery Elimination Circuit) nodig om de hoge voedingspanning van de hoofdbatterij om te vormen naar een lagere spanning, meestal 5-6 Volt, en te sturen naar de elektronica zoals ontvanger, servos en gyro. Soms is deze component ingebouwd in de snelheidsregelaar. Afhankelijk van het formaat van de servos (micro/mini/standaard/…) en het type (analoog/digitaal) zal je meer of minder stroom nodig hebben. Een 250 heli kan genoeg hebben aan een BEC die 2 tot 3 ampère kan leveren, maar voor een 450 denk je beter aan een BEC die 4 tot 5 Ampère continu kan leveren. 600 en 700 formaat helis hebben nog meer stroom nodig, en gebruiken BECs die 10 tot 15 Ampère piek kunnen leveren, ofwel gebruiken ze zelfs een aparte ontvangerbatterij. Lineaire BECs zijn technisch als verouderd te beschouwen, en warmen erg op, zorg dat je liefst een schakelende BEC aanschaft.
- Batterijen nu. Laat ons opnieuw het voorbeeld hierboven met de Scorpion 2221-8 motor bekijken. 45 ampère op een 3S lipo hadden we gezegd. OK, dus we hebben een 3S lipo batterij nodig die 45 ampère kan leveren, maar dit hoeft niet echt continu te zijn, want hier spreken we van piekstromen bij die motor. Om het eenvoudig te houden, en om een aantal andere redenen zoals reserve, minimale warmte ontwikkeling en veiligheid zullen we het echter toch maar bij die 45 ampère houden.
- OK, nu hebben we al een motor, pinion, snelheidsregelaar, BEC en batterij in onze gedachten, het hardste werk is achter de rug. Servo’s zijn makkelijker te bepalen, de beschikbare ruimte in het frame van de heli zal je qua afmetingen weinig keuze laten. Het benodigde formaat zou moeten vermeld staan in de handleiding van de heli. Het gewicht is ook een ruwe indicatie: de meeste 250 en 450 helis gebruiken servos in de 10 tot 15 gram klasse, 500 helis gebruiken servos van ongeveer 25 gram, en 600 en 700 helis gebruiken servos in de 50-60 gram klasse. Kies servos met veel koppel maar lagere snelheid voor de drie cyclische servos, en net het omgekeerde voor de staartservo. 0,08sec/60graden mag beschouwd worden als een minimum voor goede prestaties van de staart van de heli. In veel gevallen kan een staartservo toegepast worden die een klasse groter is als de drie cyclic servos, en indien deze goed past, en de heli nog steeds correct balanceert is het een goed idee om dit te doen. Het gedrag van de staart verbetert er meestal sterk op, zeker in extreme situaties. Servos met metalen tandwielen gaan minder snel stuk in een crash. Servos met borstelloze motoren verbruiken minder stroom en gaan langer mee, meer zijn duurder qua aankoop. Voor “flybarles” systemen heb je meestal digitale servos nodig, precisie is nogal belangrijk in dit geval.
- Een gyro is een zeer persoonlijke keuze, 1 ding om alvast te onthouden is de “servo frame snelheid”: sommige duurdere staartservos zijn 760 µseconde servos, en deze hebben een gyro nodig die deze frame snelheid ondersteunt, of ze kunnen vernietigd worden tijdens het gebruik. De meest gebruikte servos zijn de “normale” 1520 µseconde servos, die geen speciale gyro vereisen. Maar dit verandert allemaal heel snel. We praten niet over flybarles systemen hier, omdat de meeste mensen nog steeds starten met een heli met flybar, veronderstel ik.
- Zijn er nog andere elektronica componenten die ik nodig heb ? Nee, niet echt, maar er zijn vele optionele zaken verkrijgbaar. Lipo spanning indicatoren en alarm systemen, telemetrie, nachtverlichting, extra afstandsbediende schakelaars, enz… De beschikbare spanning(en) en de spanning die deze componenten nodig hebben zal altijd een aandachtspunt zijn wanneer je zo iets wil installeren in de heli.
- Connectors: tja, deze hebben we ook nodig. Voor motors en snelheidsregelaars zijn kogelconnectors een veel voorkomende oplossing, soms worden deze meegeleverd met de motor. De andere zijde van de regelaar die naar de batterij gaat kan verbonden worden met om het even welke connector die je wenst, maar let op voor de stromen die optreden, de connectors moeten deze aankunnen. Grotere helis gebruiken meer stroom, en daarom zijn ook grotere connectors wenselijk, zoals bijvoorbeeld EC5 of kogelconnectoren met grote diameter. De populaire Deans of EC3 connectoren zijn een goede keuze voor een 450 heli.
- Bedrading. Wablief, bedrading ? Ja, de diameter van de bedrading moet voldoende zijn om de optredende stromen te transporteren, zonder te veel opwarming. De spanningen zijn minder een probleem in modelbouw helis, deze zijn relatief laag. Normaal gezien hoef je je weinig zorgen te maken over de diameter van de bedrading, vermits de meeste onderdelen geleverd worden met de juiste bedrading, zoals motors, regelaars, batterijen, servos, enz… Als je ooit echter een stuk bedrading zelf moet uitvoeren, zoals een aangepaste seriële of parallelle kabel maken, bedrading die kapot gegaan is vervangen, of wat dan ook, en je hebt geen idee wat te doen, weet dan dat er tabellen en zelfs software bestaat die je naar een veilige draaddiameter kunnen leiden voor jouw specifiek probleem. Zoals in dit voorbeeld:
- Heb ik vermeld dat je op zijn minst een zes kanaals ontvanger nodig hebt voor de meeste elektrische (collective pitch) helis ? Er valt weinig over te zeggen, buiten het feit dat deze compatibel moet zijn met je zender. In het geval van een Spektrum ontvanger kan het zijn dat je ook 1 of 2 satellieten nodig hebt om aan de hoofdontvanger te koppelen.
- Besluit: OK, ik hoop dat dit allemaal een beetje geholpen heeft, er is nog veel meer te vertellen, maar deze basis richtlijnen zullen geldig zijn in de meeste gevallen. Aarzel niet om meer gedetailleerde informatie op te zoeken en hulp te vragen, zodra je een bepaalde opstelling in gedachten hebt. Nadien kan je beginnen met de aankoop, en alles te monteren in je heli, verbonden op een manier gelijkaardig aan het schema hieronder:
250: 3500 tot > 4000 RPM
450: < 2500 tot 3500 RPM
500: 2200 tot > 2800 RPM
600: < 1800 tot 2300 RPM
700: 1500 tot 2000 RPM
250: 3S (11.1 V nominaal – 12.6 V max)
450: 3S tot soms 6S
500: 6S (22.2 V nominaal – 25.2 V max) of iets hoger
600: 6S tot 12S
700: 12S (44.4 V nominaal – 50.4 V max)
Merk op dat hogere voltages in het begin hogere kosten zullen meebrengen, want je zal een duurdere regelaar en motor nodig hebben, maar dat zo een opzet lagere stromen zal gebruiken, minder warmte en belasting veroorzaakt in de elektronische componenten, betere prestaties levert en toelaat om qua ontlading zwakkere (en dus goedkopere) batterijen te gebruiken. Een 12S/3000mAh heli zal in veel opzichten superieur zijn aan een 6S/6000mAh heli, alhoewel beiden theoretisch gesproken dezelfde kracht kunnen leveren.
Nu komt het moment dat een rekentool voor het toerental van de hoofdbladen (headspeed) handig is. Er zijn er vele gratis verkrijgbaar op het internet. Geef de spanning in, het aantal tanden op het hoofdtandwiel en het tandwieltje op de motoras, en controleer welke KV waarde je nodig hebt om het beoogde toerental te bereiken. Speel met de waarde van het aantal tanden van de pinion (in de mate van de verkrijgbaarheid ervan) maar in het bijzonder de KV waarde om het vereiste toerental te bekomen, liefst nog met de kleinst mogelijke pinion. Dit geeft je later wat ruimte als je zou beslissen om een hoger toerental te gebruiken met dezelfde (dure) motor en een andere (goedkope) pinion met meer tanden. Als je vanaf het begin een heel hoog toerental wenst is voorgaande uiteraard niet van toepassing. OK, nu kan je de juiste motor kopen, met de gevonden KV waarde, of iets hoger als je geen motor kan vinden met deze exacte waarde. Wat heel goed mogelijk zou zijn. En ook een pinion met het juiste aantal tanden en passend op de motoras qua diameter. Tussen haakjes: het “module” getal van een pinion moet hetzelfde zijn als dat van het hoofdtandwiel, het is de afstand tussen twee tanden.>
Bekijk even dit veel voorkomend voorbeeld, waarbij we trachten correcte waarden te bekomen:
Hmm, dit toerental zou een beetje aan de lage kant kunnen zijn voor velen, nochtans gebruiken we een vrij normale 3600 KV waarde voor een 450 heli. We zouden dus kunnen denken aan een 12 of 13 tand pinion in dit geval, of zoeken naar een motor met een hogere KV waarde, zoals 3800 KV. Onthou dat de spanning de nominale spanning is, het toerental zal merkelijker hoger zijn in het begin van de vlucht ! Probeer niet om dit te compenseren met een extreem lage throttle curve, tenzij je heel goed weet wat je doet, vele regelaars oververhitten snel als ze heel laag ingesteld worden, en gaan inefficiënt werken.
Merk op dat de uitgangspanning van een BEC kan variëren tussen 5 en 6 volt, of zelfs nog meer, soms instelbaar, en dat ALLE elektronica dus deze spanning moet aankunnen. Sommige staartservos bijvoorbeeld zijn beperkt tot maximaal 5 Volt, en je kan dan een “step-down” omvormer gebruiken tussen die servo en de gyro om de spanning naar beneden te brengen tot een aanvaardbaar niveau, terwijl alle andere elektronica toch nog kan profiteren van de hogere spanning, als die dit aankan uiteraard. Die omvormer kan in het simpelste geval gewoon uit een diode bestaan.
Een aparte ontvanger batterij die alle elektronica voedt is een andere mogelijkheid, maar wordt meestal enkel toegepast in grotere helis. Dit wordt hier niet behandeld, daar deze gids bedoeld is voor beginners. Tussen haakjes, dit is ook de reden waarom “BEC” staat voor “battery elimination circuit”: het laat je toe om GEEN aparte ontvangerbatterij meer te gebruiken.
Belangrijke opmerking: als je een aparte BEC gebruikt, en je snelheidsregelaar heeft ook een ingebouwde BEC die je niet wil gebruiken omdat hij te zwak is bijvoorbeeld, dan MOET je die ingebouwde BEC uitschakelen ! De meeste handleidingen van regelaars vermelden hoe je dit moet doen, de rode (positieve) draad van de ingebouwde BEC mag niet aangesloten worden, maar de andere twee draden (negatief en signaal) moeten wel aangesloten blijven, aangezien ze het throttle signaal vervoeren. In het kort: je mag geen twee voedingspanningen uit verschillende bronnen op dezelfde ontvanger aansluiten.
Wat je nu nog moet weten is de minimale ontlaad C- waarde. Een typische 3S/2200mAh/20C batterij kan 2,2A x 20C = 44A leveren, wat amper genoeg is voor onze 45A motor. Een 25C batterij zou een betere keuze zijn, die zal het langer uithouden qua levensduur, en meer kracht hebben, in het bijzonder op het einde van een vlucht. Als je bijvoorbeeld zou proberen om een 3S/1800mAh batterij te gebruiken, dan heb je minstens een 45A / 1,8A = 25C batterij nodig. Merk op dat het kiezen van een batterij met een andere capaciteit of C-waarde ook zijn weerslag zal hebben op het gewicht en de afmetingen van de batterij.
Maar welke batterij zal nu in de heli passen qua afmetingen, en ook qua gewicht goed zijn, zodat de heli netjes balanceert rond de hoofdas ? Zoek de kenmerken van batterijen op, bijvoorbeeld via het internet, en test dit door een houten blok of gelijk wel ander voorwerp met dezelfde afmetingen en toegevoegd gewicht in de heli te steken, als dummy batterij. De heli moet balanceren, liefst zonder gewicht vooraan of achteraan moeten aan te brengen. En de kap moet nog gemonteerd kunnen worden, zonder dat de batterij dit verhindert.
Opmerking: batterijen hebben ook een laad C-waarde, dit heeft niets te maken met de ontlaad C-waarde. Dit kan echter wel een rol spelen vooraleer je batterijen aankoopt. 1C tot 2C laadwaarden zijn normaal, maar batterijen met hogere c-waarden kunnen sneller geladen worden, met een geschikte lader.
Je kan ook nog op andere manieren naar heel deze uitleg kijken, bijvoorbeeld in het geval dat je reeds een deel uitrusting bezit, wat invloed zal hebben op de manier hoe je de rest van de onderdelen zal uitkiezen. Niettegenstaande zal bovenstaande steeds gelden, maar in een andere rangschikking.
Laatste opmerking:
De gratis software “HeliPort” op www.helisoftware.com bevat informatie over motors, connectoren en hun maximale stromen, bedrading en ook een tool om toerentallen te berekenen naast andere zaken, wat het allemaal wat makkelijker kan maken.
Basiscursus: serieschakeling van vluchtbatterijen.(Raf Vertongen, 3 juni 2011)
In “batterij-wiskunde” is 2 X 3S niet gelijk aan 6S, of wel ?
Er worden vele discussies gevoerd rond de voor- en nadelen van het in serie verbinden en toepassen van lipo batterijen. Een veel voorkomend voorbeeld is het gebruik van twee 3S packs uit een 450 heli in een 500 heli die eigenlijk één 6S batterij nodig heeft. Maar ook twee 6S packs in een 600 of 700 heli die op 12S vliegen.
Voordelen, nadelen, opmerkingen, theorie en praktijk worden hier een beetje samengevat.
Ten eerste moeten we er wel voor zorgen om geen appelen met citroenen te vergelijken: het is duidelijk dat twee 3S/2200mAh/25C batterijen nooit even goed zullen presteren als een 6S/2600mAh/30C batterij. Dit is ook de meest voorkomende reden waarom mensen zullen vertellen dat twee 3S batterijen in serie zogezegd niets waard zijn in vergelijking met een 6S batterij. De meeste batterijen die gebruikt worden in een 450 heli hebben een capaciteit van ongeveer 2200 mAh, terwijl de meeste 6S batterijen in een 500 heli rond de 2600 tot 3300 mAh capaciteit hebben. En om de zaken nog erger te maken: de C-waarden zijn relatief tot de capaciteit, waardoor de 2600 tot 3300 mAh batterijen het gevecht makkelijk zullen winnen, zelfs als deze laatste een iets kleinere C-waarde hebben ! Immers: 2200 mAh x 30C = 66 ampère continu voor een typische 3S batterij, maar 3000 mAh x 25C (lagere waarde!) = 75 ampère continu, wat toch meer is, ondanks de lagere C-waarde…
Dus om een goede vergelijking te maken zou men dit theoretisch voorbeeld moeten beschouwen: twee 3S/2500mAh/30C batterijen tegen een 6S/2500mAh/30C batterij.
Laat ons nu kijken wat er gebeurt in een eerlijke strijd tussen deze batterijen:
- Puur elektrisch gesproken:
- Afmeting en gewicht:
- De prijs:
- Economisch gesproken:
- Praktisch gesproken:
- Nog een paar opmerkingen:
- Conclusie: serieel of niet serieel ?
In beide gevallen hebben we 6 aparte cellen van gelijke capaciteit, spanning en C-waarde, dus tot hier is er geen enkel verschil, dit wordt bepaald door de elektrische wetmatigheden. Enkel de verpakking is verschillend, niet de elektrische specificaties. Maar de twee 3S batterijen hebben de extra seriële connector tussen cel 3 en 4, wat een iets hogere weerstand kan veroorzaken als de interne verbinding tussen cel 3 en 4 van de 6S batterij. In feite is het nog iets erger: een 6S batterij heeft maar 1 man-vrouw connector naar de regelaar toe, terwijl twee 3S batterijen drie sets connectors nodig hebben. Niet zo heel belangrijk, maar toch al een eerste verschil. Connectoren met ultra lage weerstandswaarden kunnen uiteraard helpen.
De twee 3S batterijen zullen samen iets zwaarder en groter zijn als de vergelijkbare 6S batterij, te wijten aan de omhulsels. En er is ook de extra seriële kabel. Alhoewel er zeer compacte alternatieven bestaan waarbij de connectors direct aan elkaar gesoldeerd zijn:

Een andere oplossing is om de twee seriële connectors rechtstreeks aan de regelaar te solderen, maar dan heb je niet meer de mogelijkheid om af te wisselen tussen 1 6S of 2 3S batterijen. Wel handig voor een 450 heli op 2x3S bijvoorbeeld, een 6S pack zou toch nooit onder de kap passen.
Hoogstwaarschijnlijk zal de totale prijs van twee 3S batterijen iets hoger liggen als die van een enkele 6S batterij.
Als je bijvoorbeeld een 450 en een 500 heli bezit, dan kan je geld besparen door dezelfde batterijen te gebruiken in beide helis. Je hoeft dan geen 6S batterijen te kopen. Maar onthou dat je de 3S batterijen per twee zal ontladen in een 500 heli, en dat kan er dan voor zorgen dat je meer batterijen wil kopen om langer te kunnen vliegen…
Hier ontstaan de meeste problemen en gevaren:
5.a) Ouderdom, merk, aantal ontlaadcycli, slijtage, ontlaadcurves, capaciteit and C-waarde moeten bij voorkeur dezelfde zijn van de batterijen in serie, om problemen te vermijden. Wanneer je twee 3s batterijen om beurt gebruikt in een 450 heli, dan zal het lastig zijn om beide batterijen net evenveel te gebruiken, niet alleen qua aantal vluchten, maar ook qua ontlaadpercentage tijdens elke vlucht. De batterijen zullen na verloop van tijd verschillende ontlaadcurves beginnen vertonen.
5.b) De twee batterijen moeten liefst geladen en gebalanceerd worden als 1 enkele 6S batterij voor de beste prestaties, of toch minstens met dezelfde lader en gelijke instellingen. Ideaal is dat beide batterijen tegelijkertijd verbonden worden met dezelfde lader/balancer. Dit kan gevaarlijk zijn, want een verkeerde verbindingsvolgorde van de balanceerconnectors kan aanleiding geven tot een kortsluiting. Hierbij een foto hoe je dit kan doen, met twee 3S/2200mAh batterijen. Het idee is dat alle zes de cellen relatief aan elkaar gebalanceerd worden, en niet als twee aparte batterijen van elk drie cellen. Op de foto zie je dat de twee 3S batterijen verbonden zijn met een enkele 12S balancer (slechts 6 poorten nodig in dit voorbeeld uiteraard), niet met twee aparte balancers, en de laadkabel van de balancer is verbonden met de twee batterijen in serie.

Dit wil zeggen dat de lader en balancer slechts 1 enkele 6S batterij “zien”, en de balancer zal alle zes de cellen gelijkwaardig balanceren, en niet behandelen als twee aparte sets van drie cellen, zoals het balanceerproces dat hier bezig is (bijna afgelopen):
Merk op dat alle connectors gemerkt zijn om verkeerde verbindingen te vermijden. De negatieve pool van batterij 1 aan de onderkant van de foto gaat rechtstreeks naar de lader, EN ook de meest negatieve pool van de balanceerconnector van batterij 1 gaat naar de eerste balanceeraansluiting. Alles stopt met de positieve pool van batterij 2 aan de bovenkant van de foto die naar de lader gaat, EN de meest positieve pool van de balanceerconnector van batterij 2 die naar de laatste balanceeraansluiting gaat. Als je deze volgorde verknoeit….boem !
Grotere elektrische helis op 10S of 12S gebruiken dikwijls seriële oplossingen zoals 2x5S of 2X6s, omdat er maar weinig (en dure) andere opties zijn. Veel van deze mensen weten waar ze mee bezig zijn, ze houden hun batterijen altijd netjes in paren samen vanaf het begin en ze doen “genetwerkt balanceren” zoals hierboven beschreven of met bijvoorbeeld een Hyperion EOS 0615i Duo3 lader, en de resultaten zijn dan goed uiteraard.
Het gebruik van batterijen in serie kan inderdaad goed werken, maar als je die batterijen ook individueel gebruikt dan wordt het een last en vraagt het veel zorg zodat je echt wel goede redenen moet hebben om dit vol te houden. Het beste is om de batterijen steeds samen te gebruiken, en ze nooit individueel te gebruiken, maar dan kan je dus evengoed direct grotere batterijen kopen. Maar als je ze dan toch in paren samen houdt vanaf het begin, en alle richtlijnen hierboven volgt, dan zullen ze gelijkaardig presteren aan 1 gelijkwaardige grotere batterij, de elektrische wetten zijn immers gelijk. Veel mensen verknoeien het door gescheiden te laden en te ontladen, batterijen te gebruiken met onderling verschillende kenmerken, of eenvoudigweg zwakkere 3S batterijen te gebruiken tegenover de normale 6S batterij, en dan klagen ze dat hun batterijen het niet lang volhouden. Klinkt logisch, niet ?
De realiteit leert ons dat 12S helis met twee 6S batterijen heel goed werken, zelfs in heel krachtige helikopters. Chris Bergen van Bergen R/C bijvoorbeeld, beveelt aan om een Intrepid Magnum Tazer 800 (!) te vliegen met vier 6S2P 7400 mAh batterijen, dat zijn vier 6S packs, twee in serie en twee in parallel voor extra capaciteit om een gigantische 12S/14800mAh batterij te vormen, en je kan moeilijk beweren dat deze mensen hun stiel niet zouden kennen.
Basiscursus: toerental van heli rotorbladen aka “headspeed”.(Raf Vertongen, 3 juni 2011)
Er bestaan blijkbaar nogal wat misverstanden over heli motors, tandwielverhoudingen, toerentallen van helibladen en dergelijke. Ik weet dat er heel wat goede rekentools voor toerentallen bestaan, maar die leggen de basisprincipes niet uit. Dus kan het nuttig zijn voor beginnende piloten om al die informatie eens bij elkaar te zien.
Er zijn hoofdzakelijk vijf factoren die het toerental van de hoofbladen beïnvloeden (naast enkele minder belangrijke factoren zoals omgevingstemperatuur, maximale batterij ontlaadsnelheid, ouderdom van de batterij, enz…):
Deze vijf factoren kan je zien in de meest eenvoudige formule voor een ruwe toerentalberekening:
Batterijspanning x aantal tanden van het motortandwiel / aantal tanden van het hoofdtandwiel x het KV getal van de motor x efficiëntie van de motor = toerental (RPM)
Laat ons dit één voor één nader bekijken:
- Batterijspanning:
- Motortandwiel (“pinion”):
- Hoofdtandwiel:
- Het “KV” getal van de motor:
- De efficiëntie van de motor:
- Throttle curve:
- Finale berekening van het toerental:
Een enkele lipo cel heeft een maximale spanning = 4,2 Volt. Nominale spanning = 3,7 Volt. Waarom zo laag ? Wel, de spanning van de batterij zakt vanaf de eerste seconde van de vlucht door de zware belasting, en ze zal lager liggen als je denkt gedurende de vlucht. De meesten onder ons meten de restspanning na een vlucht, wanneer de batterij niet met onder belasting staat. Ze meten bijvoorbeeld 10,5 Volt aan een 3S lipo, en denken dat dit de laagste spanning is die opgetreden is tijdens de hele vlucht. Maar je kan er zeker van zijn dat de spanning lager was gedurende de laatste ogenblikken van de vlucht. Zodoende wordt algemeen aanvaard aan dat 11,1 Volt de reële benaderde gemiddelde spanning is voor een 3S lipo tijdens de vlucht om hiermee het toerental te berekenen. En het is logisch dat hoe meer spanning (volt) er gebruikt wordt, hoe sneller de motor zal draaien.
Conclusie 1: hogere spanning = hoger toerental (zo lang als de batterij genoeg kracht kan leveren).
We kennen allemaal bijvoorbeeld de 10, 11, 12 en 13 tand pinions voor de populaire 450 formaat helis. Je kan je voorstellen dat hoe meer tanden een bepaalde pinion heeft, hoe meer tanden een ingebeeld vast punt in de ruimte zullen passeren per tijdseenheid, wanneer we een gelijkmatige motorsnelheid veronderstellen. Zodat het hoofdtandwiel sneller zal aangedreven worden, en hoe hoger het toerental zal zijn.
Conclusie 2: meer tanden op de pinion = hoger toerental.
Dit wordt uiteraard aangedreven door de pinion. Hoe meer tanden het hoofdtandwiel heeft, hoe langer het zal duren om een volledige omwenteling te maken, ik leg uit:
Het tegenwoordig meest toegepaste hoofdtandwiel voor bijvoorbeeld een 450 formaat heli heeft 150 tanden. Een 12 tands pinion moet 12,5 omwentelingen maken om dit hoofdtandwiel 1 volledige omwenteling te roteren: 12 x 12,5 = 150 tanden. Als het hoofdtandwiel bijvoorbeeld 156 tanden zou hebben, dan moet diezelfde 12 tands pinion al 13 omwentelingen maken voor 1 volledige omwenteling van het hoofdtandwiel. Dus als de pinion aan een constante snelheid draait zal het grotere hoofdtandwiel minder omwentelingen draaien als het kleinere hoofdtandwiel in dezelfde tijd.
Conclusie 3: meer tanden op het hoofdtandwiel = lager toerental.
Dit is de reden waarom je moet DELEN door het aantal tanden van het hoofdtandwiel in de formule voor het toerental.
Dit kan een beetje lastig zijn om te begrijpen. Laat ons starten met een veel gehoorde vraag bij beginners: “hoger KV getal = een sterkere of zwakkere motor ?”. Wel, het antwoord is niet zo simpel, er is geen echt ja of nee antwoord op deze vraag. We beschouwen hier enkel helikoptermotors, dit zal het al een beetje makkelijker maken.
Ten eerste heb je een bepaalde motorsnelheid nodig om de mechaniek snel genoeg te doen draaien. Ten tweede heb je ook genoeg koppel nodig om die snelheid aan te houden onder belasting. Het KV getal van de motor duidt alleen de snelheid aan, niet het koppel. Het staat voor het toerental/minuut dat de motoras zal draaien per Volt aangelegde spanning. Voorbeeld: een populaire 3800 KV motor zal draaien aan maar liefst 3800 X 11 = 41800 RPM wanneer er een spanning van 11 Volt wordt toegepast.
Waarom al de verwarring dan ? Wel, meestal hebben grotere helis, die meer kracht nodig hebben, een motor met een lage KV waarde, maar dit is geen probleem aangezien dit gecompenseerd wordt met batterijen met hogere spanningen, motors met meer koppel, en gebouwd zijn om te draaien aan lagere toerentallen. Nu denk je misschien: goed, lagere KV wil dus zeggen een sterkere motor. Dit is niet volledig waar. Het is niet omdat motors met een lagere KV waarde gebruikt worden in grotere helis dat dit betekent dat een lagere KV waarde altijd een sterkere motor betreft. Voorbeeld: een E-Sky 3800 KV motor heeft een veel lager koppel als een Scorpion 3800 KV motor, maar beiden hebben dezelfde intrinsieke snelheid. Maar de Scorpion motor zal die snelheid veel beter kunnen aanhouden onder belasting. Kijk gewoon even in de specificaties hoeveel stroom de motor trekt, en dat geeft al een eerste idee van de sterkte van de motor, veronderstellend dat ze even efficiënt zijn (zie hieronder daarvoor).
Conclusie 4: hogere KV waarde = hoger toerental (zo lang als de motor genoeg koppel kan leveren onder belasting).
Veel voorkomende waarden zijn ongeveer 0,8 tot 0,85 voor een “outrunnner” (motorbehuizing draait mee) en 0,9 tot ,095 voor een “inrunner” (motorbehuizing draait niet mee). Er is altijd een beetje verlies in rendement in een elektrische motor onder belasting, en deze factor houdt hier rekening mee.
Conclusie 5: hogere efficiëntie = hoger toerental (maar je kan er op zich niets aan wijzigen).
Mensen hebben soms de neiging om te vergeten dat een berekend toerental het maximale toerental is dat ze kunnen bereiken wanneer de snelheidsregelaar volledig open wordt gestuurd, dus aan 100%. Velen onder ons vliegen met een throttle curve zoals bijvoorbeeld 0/50/80/90/100, en zullen quasi nooit de 100% gebruiken. Dit zal slechts gedurende zeer korte tijd gebeuren, wegens de hoge pitch waarden die dit meebrengt met de gebruikelijke instellingen. En je zal dus nooit een gemiddeld toerental bekomen dat gelijk is aan 100%. Iemand die met de bovengenoemde throttle curve vliegt zal eerder gemiddeld rond 85-90% zitten. We moeten dan ook het resultaat van de toerentalberekening verminderen met hetzelfde bedrag. Niet exact hetzelfde eigenlijk, dit hangt ook af van de software in de regelaar, maar dat zou ons veel te ver leiden. Niet vergeten dus als je een echt, reël gemiddeld toerental wil berekenen.
Conclusie 6: hoe lager de positie van de throttle stick met een niet vlakke throttle curve, hoe lager het gemiddelde toerental.
spanning x tanden motortandwiel / tanden hoofdtandwiel x KV x efficiëntie = toerental(RPM)
Voorbeeld met een veel voorkomende 450 heli met een 3S batterij:
11,1 x 13 / 150 x 3800 x 0,85 = 3107 RPM
Bij gebruik van een throttle curve zoals gesteld in punt 6) zal dit dus gemiddeld slechts 85% bedragen = 2640 RPM
Basiscursus: lipo batterijen.(Raf Vertongen, 1 juni 2011)
INTRODUCTIE:
Hierbij een stukje (samengevatte) basiskennis over lithium polymeer batterijen en hoe ze werken, hopende dat dit een aantal veel voorkomende beginnervragen zal oplossen, en dat het zal helpen om meer plezier te hebben en minder problemen te ondervinden in de modelbouwhobby.
Volt, ampère, watt, capaciteit, interne weerstand, laad- en ontlaadprocessen, balanceren van cellen, lipo, life, ni-cad, ni-mh … moeten we eigenlijk echt iets weten over al deze technische termen ? Ja, absoluut, het zal een aantal zaken makkelijker, goedkoper en vooral veiliger maken.
Geen lange les in elektriciteit, we zullen trachten dit zo kort als mogelijk te houden, en focussen op praktische, alledaags bruikbare informatie. Als voorbeeld nemen we een 3S lipo batterij, welke veelvuldig gebruikt wordt in kleinere helikopters en vliegtuigen. Maar de algemene principes gelden ook voor andere batterijen.

DE (JUISTE ?) PRAKTIJK:
OK, je blinkende nieuwe batterij is net toegekomen, en natuurlijk hang je die direct aan je lader met al die coole knopjes, drukt even op “’laden”, na een uurtje hoor je een biep, en je gaat vliegen met de batterij. Nadien herhaal je gewoon het hele proces. Simpel, niet ? Veel meer valt er toch niet te zeggen ? Toch wel, je batterij zal het waarschijnlijk niet lang uithouden, en je zal waarschijnlijk onbewust een heleboel andere risico’s genomen hebben.
DE THEORIE:
Eerst het allerbelangrijkste: lithium polymeer batterijen zijn eigenlijk potentieel razend gevaarlijk ! Ze kunnen opwarmen, en zelfs ontploffen wanneer ze misbruikt worden. Een extreem hoge ontlaadsnelheid, een kortsluiting, te diep ontladen, foutief laden of te snel laden, alle deze zaken kunnen problemen veroorzaken. Deze laatste punten zijn ook de reden waarom je nooit een lader mag gebruiken die niet specifiek voor lipo batterijen geschikt is, en zelfs bij een geschikte lipo lader moet je altijd oppassen om de juiste instellingen te gebruiken. Lipo batterijen zijn ontworpen om hun volledige kracht kunnen af te leveren in slechts een paar minuten tijd zonder zelfschade, maar het nadeel hieraan verbonden is dat het eigenlijk kleine bommen zijn die altijd klaar staan om af te gaan. Behandel ze dus voorzichtig en met aandacht, en ze zullen ongevaarlijk zijn.
Een “3S” lipo batterij betekent in feite een set bestaande uit drie individuele lithium-ion polymeer cellen, in serie aan elkaar gesoldeerd, vandaar de “S”. Elke cel heeft zijn eigen spanning (voltage), capaciteit (milli-Ampère-uur), maximaal toelaatbare ontlaad snelheid en interne weerstand. Momentje, we zouden geen moeilijke termen gebruiken, laat me dus toe om dit een beetje uit te klaren:
a) Lithium-ion polymeer:
Dit is gewoon de benaming van de chemische stof waaruit deze batterijen zijn gemaakt, maak je er geen grote zorgen over. Als je meer wil weten kan je dit artikel lezen: http://nl.wikipedia.org/wiki/Lithium-ion-polymeer-accu
b) Drie cellen:
Waarom drie, en niet gewoon eentje bijvoorbeeld ? Wel, 1 zo’n cel levert maximaal slechts 4,2 Volt af. Dit ligt chemisch vast, en dat is een te lage elektrische spanning om de meeste van onze modelbouwmotoren te voeden. Door ze echter in serie aan elkaar te solderen, bekomen we 4,2 x 3 = 12,6 Volt, wat wel een bruikbare spanning is. “Ok, dus eigenlijk heb ik drie verbonden cellen gekocht, en niet eentje ?” Inderdaad, en de fabrikant heeft ze aan mekaar gesoldeerd, er een mooie plastic folie rond gewikkeld voor je gemak, en noemt het een “batterij”.
c) Spanning (volt):
Om de energie uit de batterij te krijgen is er een bepaald spanningsverschil nodig. Vergelijk het met een emmer gevuld met water, waarin een opening in de bodem is gemaakt. Hoe hoger de emmer gevuld is met water, hoe sneller het water door de opening zal willen stromen. Hoe hoger het spanningsverschil, hoe sneller de batterij zijn energie kan afleveren.
d) Stromen (ampère):
Vergelijk dit met de diameter van de waterstraal die uit de emmer komt. Hoe groter de opening, hoe groter de waterstroom, en naar analogie hoe hoger de stroomsterkte (ampère) die de batterij zal afleveren.
e) Capaciteit (mAh):
Zoals in het bovenstaande voorbeeld geschetst, zal de waterstroom slechts zolang duren totdat al het water uit de emmer is gevloeid, bijvoorbeeld 10 liter. Deze 10 liter water is de capaciteit, het is de maximale hoeveelheid energie dat de emmer kan leveren. De batterij in ons voorbeeld heeft de aanduiding “2200 mAh”, dit wil zeggen dat ze 2200 milli ampère of 2,2 ampère kan blijven leveren gedurende precies 1 uur. Hierna zal ze helemaal leeg zijn. Ruwweg gesproken zou ze ook bijvoorbeeld tien maal meer stroom kunnen leveren, maar slechts gedurende een tien maal kortere tijd: 22 ampère gedurende 6 minuten. Hm, dit wordt interessant, want dit is ongeveer de vluchttijd van een helikopter, dus nu weten we wat die ongeveer gemiddeld verbruikt qua stroomsterkte.
Onthoud dat het raadzaam is om de batterij nooit verder te ontladen dan 80% van de nominale capaciteit. In ons voorbeeld 2200 x 0,8 = 1760 mAh. Dus de overblijvende capaciteit moet altijd hoger zijn dan 2200 – 1760 = 440 mAh. Het naleven van deze regel zal de levensduur van de batterij ten goed komen, extreme opwarming of zelfs de complete vernietiging van de batterij voorkomen. Gebruik een lader die de geladen capaciteit kan aangeven, en test eerst de ontladen capaciteit na een korte vlucht van 2 of 3 minuten. Hierna kan je een berekende schatting maken van de maximale vluchttijd. Een hele ruwe aanduiding is ook de resterende spanning zijn direct na een vlucht. Ongeveer 10,5 Volt is een minimale waarde op dat moment. Dit is nog flink boven de minimale toegelaten celspanning, maar bedenk dat die spanning (onder belasting) flink lager ligt tijdens de laatste ogenblikken van de vlucht.
f) C-getal:
Elke lipo batterij heeft deze aanduiding, bijvoorbeeld “20C” of “25C”. Dit getal laat ons toe om de volgens de fabrikant maximale toegelaten stroomafname te berekenen van een batterij. Voorbeeld: 2200 mAh x 25C. Deze batterij laat 2,2 X 25 = 55 ampère continue ontlaadstroom toe. Bekijk de kenmerken van je motor, voeg er een paar ampère toe voor de servos en ontvanger, en je zit goed als je batterij hier kan aan voldoen.
Conclusie:
Ik hoop dat onze 3S/2200mAh/25C voorbeeld batterij een beetje duidelijker begint te worden nu. Eenvoudig samengevat: 3S = 12,6 Volt maximaal / 2200 mAh = de hoeveelheid energie die ze kan bevatten, uitgedrukt in milli ampère gedurende 1 uur / 25C = de toegestane ontlaadstroom, altijd in relatie met de nominale capaciteit: 2,2 x 25 = 55 ampère.
Vele batterijen laten slechts een maximale laadstroom toe van 1C, dus 2,2 ampère in ons voorbeeld. Na ongeveer een uurtje laden aan 2,2 ampère zal die batterij dus weer helemaal opgeladen zijn. Er zijn echter meer en meer uitzonderingen op deze regel, sommige batterijen laten al laadstromen tot 8C en 10C toe.
g) Balanceren, ook dat nog ?
Onze drie individuele cellen hebben onvermijdelijk verschillende chemische eigenschappen, en licht verschillende laad/ontlaad karakteristieken. Deze verschillen worden groter naarmate de cellen meer laad/ontlaad cycli achter de rug hebben. Als we er voor zorgen dat de individuele cellen precies dezelfde spanning hebben voor we de volgende ontlaadcyclus starten, door ze elektrisch te “balanceren tegenover elkaar, kunnen we een aantal problemen vermijden. Zoals ongelijkmatige ontlading van de cellen, wat de zwakste cel kan vernietigen omdat ze de sterkere cellen niet meer kan bijbenen. De balanceerelektronica, al of niet ingebouwd in de lader, doet niets meer dan de spanning (voltage) stroomlijnen tussen de cellen onderling, door de laadstromen aan te passen. De nominale capaciteit van lke cel kan niet gewijzigd worden, daar dit bepaald is tijdens de productie, maar de balancer kan wel zorgen dat elke cel dezelfde spanning heeft bij het begin van de ontlading. De individuele interne weerstand van de cellen (zie verder) zal bepalen of dit ontlaadproces gelijkmatig zal verlopen gedurende de hele vlucht. Tussen haakjes, aangezien geen van de cellen identiek is zal dit dus niet zo zijn. Daarom gaan we opnieuw balanceren tijdens de volgende laadcyclus. Elke cyclus balanceren kan geen kwaad voor de cellen, en het enige nadeel is dat de laadcyclus iets langer zal duren.
Probeer bijvoorbeeld dit experiment: balanceer een ontladen batterij (zonder te laden), laad ze nadien op zonder balanceren, en meet de celspanningen. Dikwijls zal er opnieuw een klein verschil zijn. Zelfs het relatief trage laadproces is niet perfect gelijk verlopen voor alle cellen, wegens de ongelijke interne weerstanden. Als je heel nauwkeurig wil werken zouden de cellen opnieuw gebalanceerd moeten worden, waarbij dus weer een klein beetje capaciteit verloren gaat, die dan weer moet bijgeladen worden om de batterij op 100% te krijgen. Moderne laders balanceren en laden echter tegelijkertijd, waardoor dit verschijnsel geen probleem vormt.
h) Een paar extra tips:
- Er zijn brandvrije lipo veiligheidszakken verkrijgbaar in de handel om de risico’s te beperken.
- Gebruik een digitale lipo spanningsmeter. Dit laat toe om snel de spanning van elke cel te controleren, en te zien of ze netjes gebalanceerd en volledig geladen zijn. Een goede gewoonte is om dit elke keer te doen net voor het opstijgen.
- Leer solderen, vroeg of laat zal je dit nodig hebben om een hoofdconnector of balanceerconnector te bevestigen. Er zijn enorm veel verschillende soorten connectors verkrijgbaar, zodat je wel eens zelf een aanpassing zal moeten doen.
i) Interne weerstand:
Tot slot nog een hoofdstukje over het begrip “interne weerstand”.
Zoals velen weten is interne weerstand een dynamisch gegeven, en deze weerstand zal groter worden naarmate de batterij meer laad/ontlaadcycli heeft ondergaan. Dit wil in de praktijd zeggen dat de cellen het steeds moeilijker zullen krijgen om hun kracht af te leveren, totdat de batterij uiteindelijk onbruikbaar wordt.
Onlangs werden er twee van mijn oude 3S/2200mAH/25C batterijen totaal onbruikbaar. Ik had de vermindering in prestaties reeds lang gevoeld, en uiteindelijk werden ze zo zwak dat na twee minuten de helikopter zelfs niet meer in de lucht kon blijven.
Dit deed me beslissen om zelf eens wat metingen te doen, en om nieuwe en gebruikte batterijen te vergelijken, om zodoende een idee te krijgen welke interne weerstandswaarde dramatisch wordt. Dit kan ook gebruikt worden om enigszins te voorspellen wanneer een batterij zwakker zal worden, door regelmatig metingen te doen (elke 10 vluchten of zo), en dan de mate van verhoging van de weerstandswaarden te bestuderen.
Maar hoe meet je eigenlijk de interne weerstand ?
- Er zijn gespecialiseerde meettoestellen voor industriële doeleinden verkrijgbaar, maar deze kunnen erg duur zijn.
- Je kan ook zelf beginnen meten met een heel nauwkeurige spanningsmeter en een belasting, waarna je de interne weerstand kan berekenen uit de meetresultaten. Tijdrovend en ingewikkeld dus.
- Sommige lipo laders hebben echter een interne weerstand meetfunctie. Dit is wat ik gebruikt heb voor deze test: een iCharger106B+ welke bewezen heeft om vrij nauwkeurig te zijn qua uitlezingen. Deze lader heeft het voordeel dat hij de interne weerstand van elke cel kan meten, en niet alleen de weerstand van de volledige batterij.
De theorie die hierachter schuilt is de volgende:
Om de interne weerstand van een batterij te bepalen is het nodig om eerst gewoon de open en onbelaste spanning van de batterij te meten. Nadien moet er een belasting aan de batterij gehangen worden, welke een stroom zal doen vloeien in het circuit. Dit zal een lichte daling van de spanning van de cellen veroorzaken, te wijten aan de interne weerstand. Deze iets lagere celspanning moet dan opnieuw gemeten worden, met de actieve belasting. De interne weerstand wordt dan berekend met de wet van Ohm, gebruik makend van het spanningsverschil tussen de twee metingen en de stroom die door de cel vloeit.
Hier kan je nog meer lezen over dit onderwerp: http://www.mpoweruk.com/testing.htm
De volgende meetwaarden zijn gebaseerd op een relatief klein aantal proeven, ongeveer een dozijn, maar zouden toch al een goed idee moeten geven:
- Batterijen die zo goed als nieuw zijn: tussen 0 en 5 milli-ohm per cel.
- Batterijen die enkele tientallen keren gebruikt zijn, maar nog altijd sterk aanvoelen tijdens een vlucht: tussen 5 en 10 milli-ohm per cel.
- Batterijen die nog vaker gebruikt zijn, en zwak beginnen aanvoelen: tussen 10 en 20 milli-ohm per cel.
- Batterijen die je heli amper nog in de lucht kunnen houden: meer dan 20 tot 25 milli-ohm per cel.
Onthou dat de cellen in serie verbonden zijn, en om de totale interne weerstand (IR) van de batterij te kennen met je dus de weerstanden van alle cellen optellen. Bijvoorbeeld: een 3S batterij met IR cel 1 = 4, IR cel 2 = 6 en IR cel 3 = 5 zal een totale IR = 4 + 6 + 5 = 15 milli-ohm hebben.
Tot slot nog een paar meetvoorbeelden van interne weerstanden:
Een zeer oude, totaal versleten 3S batterij:
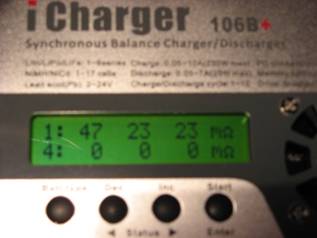
Een 3S batterij met een paar dozijn vluchten, maar nog altijd in goede conditie:

Een splinternieuwe 3S batterij:

Welke servo moet je gebruiken?
Hier een richtlijn voor het berekenen van servo's voor vliegtuigen.
| Berekenen servo koppel = breedte x lengte x snelheid² x radius | |||||
|---|---|---|---|---|---|
| voorbeeld | breedte (m) | lengte (m) | snelheid (m/s) | radius(°) | koppel (gr) |
| Aileron (1/2) | 0.04 | 0.46 | 50 | 35 | 1610 |
| Flaps (1/2) | 0.05 | 0.50 | 50 | 60 | 3750 |
| Hoogteroer | 0.07 | 0.50 | 50 | 20 | 1750 |
| Richtingsroer | 0.043 | 0.29 | 50 | 35 | 1091 |
Een eerste gebruiksklaar programma noemt "HeliPort", en is voor iedereen beschikbaar (freeware), te downloaden via de website: www.helisoftware.com
De meeste tools zijn nogal gericht op electrohelis, maar er zijn ook dingen bij die bruikbaar zijn voor vliegtuigen, zoals een batterijcalculator, tabellen met connectoren en elektrische kabels, enz....
Kijk gerust eens rond op de site, alle uitleg staat er duidelijk op, helaas wel alleen maar in het Engels. Het programma bestaat in 2 identieke versies, eentje voor Windows PC's en eentje voor Win Mobile PDA's.
Nog even voor alle duidelijkheid vermelden dat ik dit volledig gratis doe, zonder enige commerciële bedoeling, gewoon uit liefde voor de hobby(s).Integendeel, de hosting van de site kost me zelfs geld. Zot zijn doet geen zeer :-)
Met vriendelijke groeten en vertel het voort a.u.b. :-)
Raf Vertongen (username "redbird300" op helifreak.com, rcheliaddict.co.uk, runryder.com, modelbouwforum.nl en nog een hoop andere)
Verbrandingsmotor versus electromotor |
||
| Veel mensen hebben "gevoel" voor wat verbrandingsmotoren presteren. Het is dan makkelijk als je weet welke aandrijving (combinatie van motor en cellen) een verbrandingsmotor kan vervangen. Rekenen met vermogen van de verbrandingsmotor werkt niet, want bij elektro is de prop vaak veel beter aangepast en kan je met minder bruut vermogen netto hetzelfde bereiken. Aannames: - Het is handig om uit te gaan van de accu, want dat is je energiebron. - Verder ga ik uit van een flinke stroom van 35A volgas bij SC cellen (zoals RC2400). Je komt dan met gasregeling uit op 6-10 minuten vluchttijd afhankelijk van de capaciteit van de cellen (1700 tot >3000 mAh) Regeltje voor indicatie van benodigde aantal SC cellen: Motortype / 2 - 20% Edit: of handiger: dubbel, dubbel, delen door 10 Uitgewerkt voorbeeld: 6.5cc is een .40 type (cubic inches): |
40 / 2 = 20 cellen. 20% (4 cellen) eraf (omdat de cellen tegenwoordig beter zijn geeft 16 cellen. edit: anders: 40: dubbel = 80, dubbel = 160, delen door 10 = 16 Met 16 cellen en een motor die rond 35A aankan kan je een 6.5CC vervangen. Goed voor een 3kg warbird of 4kg trainer. 16 x 35 = 560 watt. 186 watt/kg voor een warbird vliegt stevig. Het mogen wel een paar cellen meer of minder zijn, maar dan moet je de stroom ook aanpassen om weer op hetzelfde vermogen uit te komen. Voor andere motoren kom je dan uit op: 15cc type 90 ==> 36 cellen van SC type (RC1700, RC3000 maat) 10cc type 60 ==> 24 cellen 6.5cc type 40 ==> 16 cellen 4cc type 25 ==> 10 cellen 2.5cc type 15 ==> 6(7) cellen 1.7cc type 10 ==> 4 cellen (zie "andere cellen") 0.8cc type 05 ==> 2 cellen |
|
| Andere cellen dan SC gebruiken |
||
| Als je een klein motortje wilt vervangen (1.7cc = .10 motor) kom je uit op 4 SC cellen. Dat is niet praktisch, dus dan neem je meerdere kleine cellen die dan weer hetzelfde wegen als die 4. 7 cellen 2/3SC 1200mAh is dan een prima keuze. i.p.v. 35A bij 4 cellen, neem je dan 20A bij 7 cellen. Bij 0.8cc vervangen zie je 2 cellen. Dat is 120gram aan cellen. 7 cellen van type KAN of Hecell 1000 mAh NiMh voldoen dan leuk. 7 cellen i.p.v. 2 betekend dat de stroom 3.5 keer zo laag kan, dus naar 10A. 7 cellen met 10A met een speed 400 blijkt in de praktijk een prima aandrijving voor vliegtuigen waar vroeger een coxje op werd gezet. Eventueel kan je nu weer lipo's zoeken die de gevonden cellen in |
spanning en stroom kunnen vervangen. Voor lipo's bepaal je eerst hoeveel SC cellen je nodig hebt en bij welke stroom. Dan zoek je een pakket wat dit kan vervangen. Reken 1 lipo = 3 NiCad cellen voor de spanning. Stroom hangt af van de belastbaarheid van de lipo (8C, 10C, 15C) en gewenste looptijd. Eventueel cellen parallel schakelen. 16 RC2400 laat zich bijvoorbeeld vervangen door 5s2p 2600 polyquest cellen (5.2Ah, 10C ==> 52A max) Hou wel de andere vuistregels in de gaten. Vooral de vleugelbelasting mag niet te hoog. Een te zware bak gaat niet vliegen als je er een hoop cellen bij gooit. |
|
Vuistregels "Rekenen" met motor en prop parameters. |
||
| Elektro motoren zijn breed inzetbaar. Dat is mooi, maar maakt het ook lastig om een bruikbare motor/prop combinatie te vinden Bij juiste gebruik mag je uitgaan van een zeker rendement, hoeveelheid stroom dat een motor mag hebben enz... Ik heb een aantal aannames bedacht die vrij algemeen voor moderne borsteloze motoren moeten gelden. In dit verhaal probeer ik om een zo praktisch mogelijke beschrijving te geven van hoe te werken met motor parameter zoals ze in de catalogus te vinden zijn. Uiteindelijk zijn alleen toeren-per-volt (rpm/V) en motorgewicht van belang. |
Voor de uitleg probeer zoveel mogelijk formules weg te laten, maar dat is niet overal mogelijk.
|
|
| Parameters |
||
| De meeste fabrikanten van borsteloze motoren leveren getallen mee die het gedrag van de motor beschrijven. Bij andere motoren (zoals goedkope speed) kunnen deze gegevens meestal worden afgeleid. Kv = RPM/V of wel toeren (per minuut) per volt (RPM = rotation per minute) Ri = inwendige weerstand in (mili)ohm Io = nullast stroom in Ampere. Een overzicht is te vinden bij de downloads van ecalc of motocalc: http://www.slkelectronics.com/downloads/motors.zip http://www.motocalc.com/data/motor.html |
Naast deze parameters geeft de fabrikant hopelijk meestal wel op voor welke stroom en aantal cellen de motor geschikt is. Hierdoor weten we het maximum ingangsvermogen (1) dat de motor mag hebben en dat is weer van belang om te weten of de motor sterk genoeg is voor onze toepassing (zie andere vuistregels). Meestal zie je de stroom bij maximum rendement (eng: "efficiency", duits: "wirkungsgrad") en dee maximale stroom die meestal 1.5 of 2 keer zo hoog ligt.
|
|
| Een praktische kijk | ||
| We laten de nullaststroom buiten beschouwing. Die is toch laag bij borsteloze motoren (hoe zou dat nu komen?) en op de totale stroom bij gemiddeld gebruik procentueel maar een kleine waarde. De inwendige weerstand is wel van belang, want die bepaald in welk stroomgebied bij een bepaald aantal cellen de motor het beste werkt. |
Als we al een opgave van de fabrikant hebben over bruikbare stromen, dan hoeven we daar eigenlijk verder ook niet naar te kijken. Belast in de buurt van maximum rendement stroom zakt het toerental een factor 0.9. Bij borstelmotoren of bij de maximum stroom van borsteloze motoren zakt het toerental onder belasting 0.8 of meer. |
|
| motor gewicht |
||
| De hoeveelheid warmte die een motor kan verdragen hangt af van hoeveel massa er opgewarmt moet worden, en hoeveel koeloppervlak er is. Simpel gezegt: een grote motor kan meer warmte verdagen dan een kleine. |
Alle ingangsvermogen dat niet in draaien wordt omgezet wordt omgezet in warmte. Een grote motor kan meer vermogen leveren dan een kleine (wat een verassing ) |
|
Van de gegevens van de fabrikant zijn uiteindelijk van belang: |
||
| Aanames: |
||
| 1. Motoren met gelijke rpm/v (onder belasting) kunnen dezelfde prop draaien, of dat nu een klein motortje is, of een hele grote. 2. Het maximum (ingangs)vermogen hangt af van het gewicht van de motor (uitgaande van hoog rendement volgens (6)) 3. rpm/v en gewicht mogen ook inclusief vertraging worden bepaald. 4. Het belaste toerental is lager. Reken met 0.8 keer het onbelaste toerental. 5. Terugrekenen naar onbelast toerental (om rpm/V van motor te bepalen). Het onbelaste rpm/V van de motor moet hoger zijn dan is gewenste belaste rpm/V. Belaste (=gewenste) rpm/V delen door 0.8. 6. Reken voor rendement motor: |
60% voor feriet |
|
| Prop uitzoeken |
||
| Een propeller heeft vermogen nodig om op een zeker toerental te draaien. Een kleine prop heeft maar een beetje nodig, een grote prop natuurlijk meer, maar zijn hier waardes voor bekend? Uit theoretische berekening, maar ook door uitproberen en meten zijn formules en parameters bepaald waaruit je dit kan bepalen. Controleer wel even hoeveel vermogen de gewenste prop heeft bij lage snelheid. In stand is de stroom hoger dan tijdens het vliegen. Je regelaar moet echter in stand niet doorbranden. Het toerental waar je belast op gaat draaien hangt af van de spanning en is 0.8 keer onbelast toerental. |
Formule (sorry): proptoeren = rpm/V van je motor * spanning * 0.8 Je weet ook het gewenste vermogen (zie vuistregels). Bij xx watt/kg gaan we uit van ingang. Aan de as blijft er minder over volgens aaname 6. Voorbeeld: Met 100watt/kg hou je bij een borteloze motor 80 watt aan de as over (80% van 100). Met propselector kan je nu een prop zoeken die proptoeren draait en daarbij het gewenste as vermogen "absorbeerd" |
|
| Motor uitzoeken | ||
| Je weet het ingangs vermogen dat je motor moet verwerken (vuistregels. xx watt/kg). Zoek een prop uit die bij het vliegtuig past en 80% van het gekozen ingangs vermogen gebruikt ("absorbeerd" in propselector) Propselector of tabel/grafiek geeft dan het proptoerental Je weet met hoeveel cellen je gaat gebruiken, dus (naast de stroom (1)) weet je nu ook hoeveel volt (volgens aaname 7) toeren per volt (belast)= toeren onbelast / accuspanning. Om benodigde toeren/volt (rpm/v) te bepalen van de motor die we nodig hebben (volgens aaname 5): rpm/V (onbelast) = rpm/V (belast)/0.8 (Controle: Onbelast geeft meer toeren dan belast) Uit aaname 8 weet je nu motorgewicht Je hebt nu rpm/V (met of zonder vertraging te bereiken) en het motor gewicht. Zoek een motor die hieraan voldoet en controleer of de motor met de gewenste stroom (1) mag werken volgens de fabrikant. Je kan nu meerdere mogelijkheden vinden. bijvoorbeeld: |
- Een lichte motor met vertraging die in optimale gebied draait. Licht en hoog rendement (volgens aaname 6), maar wel complexer en waarschijnlijk duurder. - Een iets zwaardere buitenloper motor die rechtstreeks de prop kan draaien, maar dan wel buiten het beste rendement draait (rendement 70% rekenen) - Een zware motor (buitenloper of binnenloper) die zowel direct de prop kan aandrijven en daarbij ook in het optimale gebied draait. Goed rendement (80%), maar wel zwaar. Je keuze wordt verder bepaald door prijs, gewicht, inbouwgemak, andere toepassingen (met en zonder vertraging) enz... (1) Ingangsvermogen [watt] = stroom [ampere] X spanning [volt] (2) Vermogen gaat tot de 3e macht. 6& meer toeren is 1.06 x 1.06 x1.06 = 1.20 maal het vermogen. Nog toe te voegen: - voorbeelden - tabellen van props - meer links van online programma's |
|
Reacties |
||
| Een motor uit kiezen voor een vliegtuig is in de eerste plaats vastleggen hoe je wilt vliegen , hoe snel , met hoeveel thrust, toeren , spoed en prop diameter . Hier mee bepaal je de energie stroom die de motor moet geven om tot de bedoelde vliegprestatie,s te komen . Als je weet wat je wil zijn deze ,, cijfers " goed te calculeren. Ten eerste de snelheid gerelateerd aan de kruissnelheid Voor kruissnelheid is de formule W/S=0,38V ^2 b.v. 300gr/30dm ^2=0.38 V^2 , V=5.13 M/sec , 18.47 km/uur, [ ^ staat voor tot de macht van b.v. 2 kwadraat ] nu is de vraag wil ik 2x , 2.5 , of 3x zo snel vliegen [2x betekent =/- 2.6x Vstall , of wel een snelheid bereik van 2.6]. De snelste prop kisten zitten op 3x kruissnelheid , niet aan te raden voor een model vliegtuig , je moet hem zo sterk bouwen , en het kost veel motorvermogen , de weerstand is groot. Ik kies meestal 2x kruissnelheid. Ook wat betreft statische thrust kunnen we kiezen uit : minimaal 1/2 x het gewicht tot 10/7 x het vlieggewicht om van uit het hooveren weer mooi weg te kunnen vliegen [zo je ziet ,ik denk toch wel modern over het vliegen]. Hierna ga ik de spoed van de prop kiezen , een reeele spoed die past bij het vliegtuig b.v. een 5 voor indoor , een 4 voor een slow fly , een 6 voor een trainer , een 8 voor een speed kist. Met deze gegevens [onze eigen keuze] kunnen we verder want we kunnen nu ook ons toerental uitrekenen , hiervoor hebben we de formule : Vmax=1.22 x 10^-3 x n x s km/uur [n in toeren per minuut , s = spoed in inches] , b.v. 36 km/uur = 1.22 x 10^-3 x n x 5 [ bij mijn indoor kist] , 36/0.0061 = n , n = 5901 rpm Als we nu een calculator voor statische thrust erbij pakken kunnen we de prop diameter en het benodigde vermogen vinden. De meest nabij gelegen keuze is : 6000 rpm , prop 9x4.7 , statisch thrust is 0.71 lbs , vermogen 0.048 pk ofwel thrust 322gr en vermogen 35.8 watt en max snelheid ligt op 43 km/uur 11,94 m/sec |
De calculator http://freespace.virgin.net/barry.hobson/
|
|
Hellingzweven in praktijk
Vliegen op de helling is niet te vergelijken met een vlucht op het vlakke land. Naast het feit dat je een heel ander zicht hebt op je toestel, zijn de omstandigheden waarin je vliegt helemaal verschillend. Ben je op het vlakke land gewend om thermisch te vliegen, dan weet je dat je dikwijls al je kennis moet bovenhalen om die extra minuten in de lucht te blijven. Op de helling vlieg je zolang de wind op de helling blaast, of je batterijen het toelaten
Er is wel enig inzicht nodig in de gedraging van de wind t.o.v. de helling. Als je voor de eerste maal op een helling vliegt kan je beter even grondig bestuderen hoe de wind zich gedraagt, of een kennis die ervaring heeft raadplegen. Het enige nadeel dat je direct ondervindt met het hellingvliegen is het feit dat er meestal geen geschikte landingsplaats is om je toestel netjes binnen te brengen. Meteen ook de reden dat je weinig |
schaalbakken op hellingen ziet vliegen. De kostprijs hiervan is vaak te hoog om het risico op een foute inschatting bij het landen te nemen. Natuurlijk kan je dikwijls opnieuw proberen omdat je steeds weer in de hellingwind kan vliegen, waardoor je een nieuwe kans krijgt om je landing in te zetten.
Helaas tellen we in België en Nederland bijzonder weinig hellingen die toegelaten zijn voor onze hobby. De omringende landen zijn echter zeer geschikt, zoals de streek rond Cap Blanc Nez en natuurlijk de Cap zelf. |
|

Zweefvliegen |
||
| Zweefvliegen is een van de weinige takken in de modelvliegwereld die zoveel rust en stilte met zich mee kan brengen. Zweven is een gevecht tegen de elementen van de natuur wat elke keer weer een fascinerende bezigheid is. Zweven is erg leuk vooral op zonnige dagen als de lucht verwarmt word en er voldoende thermiek (opstijgende kolommen lucht) aanwezig is, | het is dan mogelijk een zwever tot heel grote hoogte te brengen en uren te vliegen van 'thermiekbel' naar 'thermiekbel'. Zweven is voor beginnende modelvliegers een ideale manier om kennis te maken met de modelvlieghobby en vliegvaardigheid op te doen. |
|
| Beginnen met zweven |
||
Er zijn verschillende mogelijkheden om te beginnen met zweven, het is verstandig om in het begin te beginnen met een eenvoudig beginnersmodel en dit langzaam opwerkt naar eventueel grotere zwevers. Ook is het handig om te weten wat u wilt gaan zweven als u een beginner bent die nog nooit gevlogen heeft dan kunt het beste eerst lid worden van een plaatselijke modelvliegclub, ervaren zwevers (er zijn er altijd wel een paar met goed vliegweer) kunnen u dan op weg helpen met een goede keuze. Daarnaast is het altijd verstandig om bij een modelvliegclub aangesloten te zijn ook omdat u dan de beschikking hebt over een goed vliegveld en goede voorzieningen niet te vergeten dat vliegen met een modelvliegtuig buiten een modelvliegveld officieel niet toegestaan is. |
Als beginners zwevers raden wij je -afhankelijk van wat je wilt- een beginnersmodel te kopen met een spanwijdte niet groter dan 3 meter. Kies voor een zwever met een richting en hoogteroer en eventueel flaps in de vleugels. Er zijn diverse beginnersmodellen te koop en ook de grote leveranciers zoals Graupner, Multiplex en Robbe (om er maar een paar te noemen) beschikken in hun assortiment over enkele speciale beginnerskisten die zich onderscheiden van andere zwevers door grotere stabiliteit en veelal een rustiger vliegbeeld. Voor zwevers met richting en hoogteroer is een 2-kanaals zender voldoende wil je ook flaps en/of remkleppen dan moet een 4-kanaals zender worden aangeschaft. |
|
| De kunst van het zweven |
||
Zwevers (vooral grote) kunnen zeer elegant zijn, ze worden omhoog geliert of gesleept waarna een langzame afdaling naar de aardbodem volgt. Vliegt u voor uw plezier dan kan het de kunst zijn om thermiek te zoeken. Voor verschillende wedstrijden die met zwevers worden gehouden zijn er verschillende doelen die u moet behalen, daar gaan we echter niet op in omdat dit buiten het kader van deze gids voor beginners valt. |
andere vliegtuigen maar ook enkele nadelen, het licht eraan hoe we dit bekijken. Voordelen en nadelen van zwevers hieronder op een rijtje:
Nadelen grote zwevers kunnen zijn: |
|
| Conclusie |
||
| Als zweven u wel wat lijkt loop dan eens binnen bij een plaatselijke modelwinkel en vliegclub en vraag daar ofu enkele modellen kunt bekijken. Meestal bezitten modelbouw winkels catalogussen van de 'grote merken'. Hierin staan de modellen uit hun assortiment inclusief allerlei gegevens. |
Zweven is een leuke tak in de modelvliegsport die veel rust en genoegen met zich mee brengt en het is over het algemeen goedkoper dan motorvliegen. |
Hoe blijft een vliegtuig in de lucht
Een vliegtuig blijft in de lucht door zijn vleugels die luchtstroming omzetten in draagkracht. Maar hoe werkt dit nou precies?
Ten eerste zie je bij de vleugel dat de voorlijst iets hoger licht dan de achterlijst. Ook is de bovenkant van een vleugel bol en de onderkant is plat.
Door deze twee dingen komt er aan de onderkant van de vleugel meer druk dan aan de bovenkant, maar omdat de luchtdruk overal hetzelfde wil zijn trekt deze zichzelf omhoog.
Er zit echter een vleugel tussen die drukverschillen! De lucht drukt echter gewoon door, zo krijg je dus draagkracht. De meeste kracht van de vleugel komt echter van de onderdruk boven aan de vleugel en niet van de overdruk eronder.
Door de neus iets omhoog te sturen krijgt de vleugel iets meer draagkracht, wat gebruikt wordt bij het opstijgen. Je moet echter niet te veel omhoog sturen, want dan komen er aan de achterkant van de vleugel wervels, waardoor je juist minder draag- kracht krijgt. Als je nog meer omhoog stuurt worden de wervels zo heftig dat de draagkracht bijna geheel wegvalt. Dit heet overtrekken.
Sturen
Het sturen gebeurt met de roeren, dit zijn beweegbare stukken aan de vleugels en staart. Ze werken hetzelfde als de vleugels, door ze links/rechts of hoog/omlaag te sturen wordt een bepaalde kant op meer lift geproduceerd die dat roer dan omhoog/omlaag of links/rechts duwt. De roeren waarmee het vliegtuig kan rollen (rolroeren) werken zo: er zit aan elke vleugel een roer. Deze draaien altijd in tegengestelde richting. Hierdoor wordt de ene vleugel omlaag en de andere omhoog bewogen.
Alles wat je moet weten over electro modelhelicopter Klik hier Auteur: Peter J.J. van Hout
Verschillende gyro types met uitleg en en hoe ze werken(NL) Gyro's voor modelhelicopters (Auteur: Peter J.J. van Hout)
Hoe werkt een hoofdrotor(NL) Rotortechniek (Auteur: Peter J.J. van Hout)
Verschillende rotoraansturingen(NL) Aanstuurmethodes (Auteur: Peter J.J. van Hout)
Alles over hoe een helikopter werkt (NL) Helikopter (Auteur: Peter J.J. van Hout)
Berekeningen voor helikopter Software (Auteur: Peter J.J. van Hout)
Meer info Klik hier . Auteur: Peter J.J. van Hout
Om het weg draaien van de staart t.g.v. het motorkoppel te compenseren en de staart richting tevens bestuurbaar te houden komen we meerdere methodes tegen.
Grofweg zijn deze op te splitsen in drie hoofdgroepen t.w.
1: Staartbesturing zonder heckrotor.
2: Staart besturing met variabel toerental en vaste pitch instelling.
3: Staart besturing met variabele pitch instelling en vast toerental.
1: De staart besturing zonder heckrotor ( NOTAR ):
De besturing van de staart zonder gebruik van de klassieke heckrotor wordt ook wel een NOTAR (NOTARotor) besturing genoemd.
Ondanks dat deze besturings methode nog niet ben tegen gekomen bij de modelhelicopter wil ik toch gezien de vele vragen die hierover zijn een uitleg geven over de werking hiervan.
Natuurlijk moet ook bij de heckrotorloze heli het koppel van de motor gecompenseerd worden immers de romp wil door het koppel een andere kant op dan de hoofdrotor draait.
In het voorbeeld ga ik even uit van een rechtsom draaiende hoofdrotor.
Voor een linksom draaiende geld dan natuurlijk het omgekeerde.
Kijken we naar de twee plaatjes dan zie je een dikke staartbuis waarin een een impellor gemonteerd zit met een regelbare pitchcontrole.
De luchtinlaat hiervoor zit boven op de romp.
De neerwaartse luchtstroom van de hoofdrotor stroomt langs de dikke staartbuis waardoor aan beide zijde van de buis een luchtstroming plaatsvindt.
De impellor in de staartbuis zorgt voor een wervelende luchtstroom in de staartbuis.
In geval van een rechtsdraaiende rotor draait deze in de richting van de aangegeven pijlen.
Op de aangegeven plaatsen op tekening zitten twee horizontale gleuven (Coanda slots) in de buis waar de wervelende lucht kan uittreden.
Hierdoor ontstaat aan de buitenzijde het z.g. Coanda - effect genoemd naar de ontdekker hiervan.
Dit houd in dat de luchtstroming buiten de buis (en gedeeltelijk ook binnen) de neiging heeft de circelvormige beweging verder te voort te zetten.
Hierdoor ontstaat aan een zijde van de buis een lagere luchtdruk dan aan de andere zijde waardoor een tegen-reactiekracht ontstaat die samen met de overblijvende lucht die aan de achterzijde uittreed voldoende is om het tegen koppel te kunnen vormen voor de heckcompemsatie.
Het tegenkoppel is hoofdzakelijk nodig bij het hoveren.
Vliegt de heli in een voorwaartse richting wordt er een groot gedeelte gecompenseerd door de vleugels en stabilo vlakken die achter op de staart gemonteerd zitten.
2: Staart besturing met variabel toerental en vaste pitch instelling:
Bij vooral kleine lichte modelheli's vindt de heckcompensatie en besturing plaats d.m.v. een aparte elektromotor op de staart.
Door het toerental te verhogen of verlagen wordt het tegenkoppel meer of minder.
Technisch gezien is deze constructie gemakkelijk te verwezenlijke.
Het benodigde mechaniek is hier terug te brengen naar een heckrotor met vaste pitch die rechtstreeks op de motoras wordt gemonteerd.
De rest van de aanstuurtechniek wordt verzorgd door de electronica.
Bij een autorotatie is op deze manier de staart dan ook niet meer bestuurbaar.
3: Staart besturing met variabele pitch en vast toerental:
Bij de staartbesturing met variabele pitch wordt de pitch gevarieerd m.b..v. een z.g. stuurbus die over de heckrotoras kan schuiven.
Aan de stuurbus zit de stuurarm bevestigd die naar een servo gaat.
Door afstand A te kunnen regelen wordt dus de pitch versteld waardoor meer of minder tegenkoppel voor de staart geleverd kan worden.
Het toerental behoefd dan niet meer gevarieerd te worden en de aansturing wordt hierdoor ook nauwkeuriger controleerbaar.
Auteur: Peter J.J. van Hout
Leren vliegen voor beginners
U hebt de grote stap gewaagd en, nadat voldoende geld was bijeengebracht, een besturingsinstallatie en een motor gekocht. Met een beetje fantasie ziet U de droom van een Spitfire of Lancaster al werkelijkheid worden.
Iedereen zal wel ongeveer met zulke gedachten rondlopen en er is geen enkele reden waarom deze onderwerpen niet aan de orde zouden komen als eenmaal de benodigde ervaring is opgedaan.
En hiermee zijn we aan de kern van de zaak gekomen; de sleutelwoorden zijn: "benodigde ervaring" en het is moeilijk te begrijpen welke problemen en risico's er aan het leren vliegen met afstandsbediening kleven, zolang er nog geen ervaring is opgedaan.
Uiteraard zult U piloten tegenkomen die van zichzelf kunnen zeggen dat ze een uitzondering op de regel waren en zonder enig probleem en met succes hebben leren vliegen met een schaalmodel laagdekker.
Deze 'vogels' zijn echter zeldzaam en de kans op schade aan het model en installatie is bij deze vliegtuigtypen zeer groot.
Een zeer belangrijke factor, die van invloed is op succes in het leren vliegen is wel een modelvliegclub.
Als lid zult U kunnen profiteren van de ervaring en hulp, die in een club als vanzelfsprekend wordt aangeboden. Natuurlijk is het mogelijk om in Uw eentje te leren vliegen, maar Uw eenzame en lange weg zal geplaveid zijn met brokstukken en frustraties en niet zelden zal Uw interesse in deze fascinerende sport daardoor geheel verdwijnen.
In de modelvliegerij begint één ieder nog lager dan de laagste sport van de ladder, namelijk op de grond!
U zult zich hierbij moeten neerleggen.
Het tempo en het gemak waarmee U leert vliegen worden in hoofdzaak bepaald door drie dingen:
- Aanleg
- Instructie
- Model
In onderstaande figuur is te zien op welke wijze U de weg naar de top kunt afleggen. Daarbij zijn twee routes aangegeven, in de figuur aangeduid met 1 en 2.
De te kiezen route hangt van een aantal dingen af, zoals:
- Ambitie
- Vaardigheid in het bouwen van modellen
- Financiële ruimte
- Mogelijkheden voor transport
De figuur wil niet meer zijn dan een schematisch overzicht en het is zeker mogelijk om van de ene op de andere route over te gaan naarmate Uw interesse en ambities toenemen.
Tevens moet U er op letten bij het in elkaar zetten van een modelvliegtuig dat dat nauwkeurig gebeurt.
Zwaartepunt, gewicht, trimmen, motorbehandeling, roerfuncties en talloze andere zaken die het vlieggedrag beïnvloeden.
Tijdens het bouwen van het door U uitverkoren model, zou U regelmatig Uw licht moeten opsteken op een vliegterrein. Daar krijgt U een indruk van de vaardigheid en bekwaamheid van de aanwezige piloten en tevens welke piloten eventueel bereid zijn instructie te geven. De keuze van het model voor de eerste vlieglessen is een belangrijke factor bij de vorderingen van het leren vliegen.Clubleden zijn in staat om U praktische adviezen te geven over modellen en besturingsinstallaties en hun aanbevelingen zijn gebaseerd op ervaring!
Het vliegtuig
Enige begrippen
In grote lijnen kan een vliegtuig onderscheiden worden in vleugel, romp, horizontale en verticale staartvlakken, motor(en) en onderstel.
Voor het opwekken van krachten zijn de vleugel en de staartvlakken het belangrijkst, terwijl de motor voor de voorwaartse beweging zorgt.
Spanwijdte:
Dit is de afstand tussen de beide vleugeltippen, gemeten in een rechte lijn. Spanwijdte = b
V-stelling:
De hoek gezien in vooraanzicht tussen de vliegtuigdwarsas en de lijn op 50% van de vleugeldikte.
Pijlstelling:
De hoek gezien in bovenaanzicht tussen de vliegtuidwarsas en de lijn die de punten op 25% van de koorde (kwartkoordelijn), gemeten vanaf de vleugelvoorrand, met elkaar verbindt.
Het vliegtuigassenstelsel:
Het vliegtuig kan bewegingen maken rond de drie denkbeeldige assen welke loodrecht op elkaar staan (zie figuur). Deze assen snijden elkaar in het zwaartepunt (Z) van het vliegtuig.>
Vleugelkoorde:
De rechte lijn welke de neus van het vleugelprofiel met de achterzijde verbindt.
Invalshoek:
Dit is de hoek welke de vleugelkoorde maakt met de richting van de ongestoorde luchtstroming. De invakshoek wordt aangeduid met de griekse letter α (alfa)
Aanvalsboord en vluchtboord:
Zijn respectievelijk voor- en achterkant van het vleugelprofiel.

Instelhoek:
De hoek welke de vleugelkoorde maakt met de langsas van het vliegtuig. De instelhoek wordt aangegeven met de letter i.
Stuurvlakken van een vliegtuig:
Hoogteroer doet het vliegtuig bewegen rond de dwarsas.
Richtingsroer doet het vliegtuig bewegen rond de topas.>
Rolroer doet het vliegtuig bewegen rond de lengte-as>
Beginnen
Als je met de modelvliegsport wilt beginnen moet je zeker bij een club gaan.
Het is verboden om op een niet erkend terrein met een vliegtuig te vliegen.
Verder moet je een goed model kopen. Het toestel moet makkelijke vliegeigenschappen hebben.
Het is zeer belangrijk dat het toestel een hoogdekker is en dat hij een redelijke V-stelling heeft. De V-stelling zorgt ervoor dat het toestel automatisch recht komt te liggen als het scheef ligt.
Je kunt beginnen met een zwever of met een motortoestel. Bij een motortoestel leer je het een stukje sneller omdat je met een motortoestel een langere vlucht kunt maken.
Een zwever kun je ook uitrusten met een motor zodat je na een zweefvlucht nog een keer omhoog kunt.
Electrovliegen heeft vooral voordelen bij het electrovliegen omdat je na een zweefvlucht de motor weer gewoon aan kunt zetten.
Wel is een brandstofmotor een stuk goedkoper dan electromotor, omdat je bij electro ook nog een snellader, een extra accu en een regelaar nodig hebt.
Het is niet verstandig om een ARTF (Almost Ready To Fly) kit te kopen omdat hier vaak een kunststof romp bij zit en deze is moeilijk te repareren. (je moet er wel op rekenen dat dit een keer zal gebeuren)
Enkele goede beginnerstoestellen voor motorvliegen zijn:
Prijzen
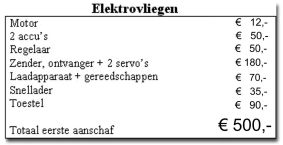
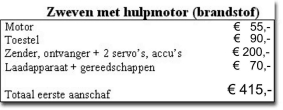
Alles wat je moet weten over electro modelhelicopter Klik hier. Auteur:Peter J.J. van Hout
Hoe werkt een elecro-modelhelikopter:
Om een idee te geven hoe een electro model helikopter opgebouwd is hier een globale verdeling van de onderdelen met hun functies:
In grote lijnen is deze opbouw gelijk voor alle electrohelicopters.
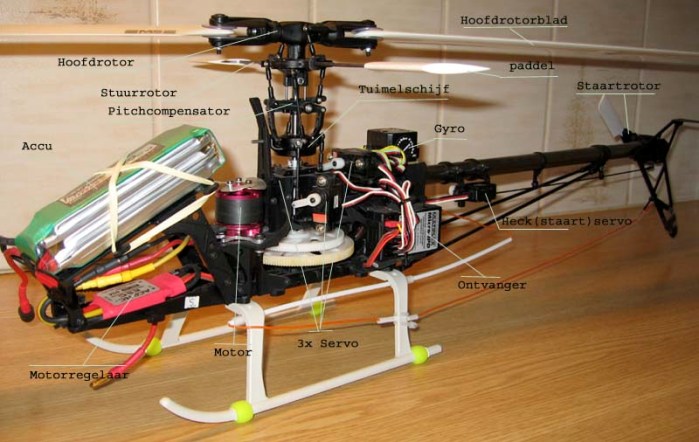
Behalve de zender om het geheel te kunnen besturen bestaat de heli in hoofdzaak uit de volgende onderdelen:
Ontvanger
Servo's (4x)
Accu
Motorregelaar
Gyro<
Electromotor
Staartrotor:
De staart of heckrotor bestaat globaal uit op de heckrotoras opgebouwde
heckrotorkop met heckrotorbladen
Hoofdrotor:
Deze bestaat globaal uit op de hoofdas opgebouwde:
Tuimelschijf ,
stuurrotor met
paddels -
pitchcompensator ,
hoofdrotorkop met
rotorbladen
Functie van de zender:
De zender zet de stuurbewegingen van de stuurknuppels op de zender om in een samengevoegd elektrische signaal en zend dit uit.
Het aantal "kanalen" op een zender bepaald hoeveel verschillende aanstuur mogelijkheden er zijn.
Voor elke aan te sturen beweging is dus een kanaal vereist en in de zender worden deze kanalen samen gevoegd tot een enkel signaal wat dan uitgezonden wordt.
De moderne zenders (z.g. computer zenders) worden steeds uitgebreider in mogelijkheden.
In de besturingssoftware van de zender zijn steeds meer softwarematige instellingen zelf te programmeren, welke in het verleden op een mechanische manier tot stand moesten komen.
Denk hierbij b.v. aan het combineren (mixen) van stuurbewegingen zodat met een beweging meer dingen tegelijk kunnen worden aangestuurd..
Ook is het soms mogelijk om meerdere modellen (vliegtuigen of helicopters) elk afzonderlijk in de zender op te slaan en via een menu een model te kiezen waardoor er dan maar een zender nodig is voor meerdere modellen.
Voor het vliegen is i.v.m de veiligheid in de 35 Mhz band een aantal kanalen beschikbaar gesteld speciaal bedoeld voor het modelvliegen.
De 40 Mhz band is meer algemener bedoeld voor alle modellen niet alleen vliegend en ook de 2.4 Ghz wordt steeds meer gebruikt voor modelbesturing.
De stuurbewegingen van de heli met de resultaten die voor komen:
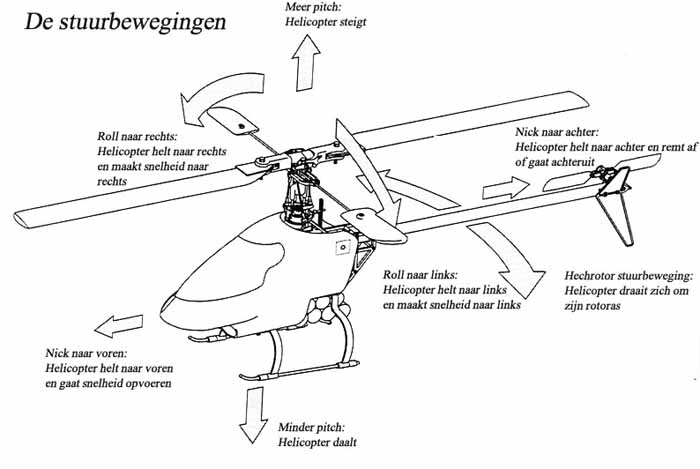
Bij het aansturen wordt voor elke beweging zoals b.v. voor rollen (links- rechts) of voor b.v. nick (voor- achter) of pitch (hoog- laag) door een enkel kanaal bedient.
Over het regelen van de hoogte kan ik opmerken dat dit in dit voorbeeld plaatsvind door het regelen van de pitch (later hierover meer) en niet door het toerental te varieren.
Het aantal kanalen wat nodig is om een heli te vliegen varieeerd een beetje naar samenstelling maar als uitgangspunt moet al gauw gedacht worden aan minimaal zes kanalen om niet in de problemen te geraken.
Hierbij wordt dan rekening gehouden met apart te regelen motortoeren en gyro gevoeligheid van af de zender (zie >voorbeeld van het aansluitschema).
De indeling van de stuurbeweging op de zender:
De indeling van deze stuurbewegingen op de zender kunnen op verschillende manieren ingedeeld worden en zijn een beetje afhankelijk van hoe iemand dit zelf als handig ervaart (of soms hoe de instructeur gewend is te sturen).
Meestal wordt wel uitgegaan van een aantal "standaard" indelingen waaruit gekozen wordt om alles een beetje universeel te houden.
Ze worden uitgedrukt in z.g. "stickmodes".
Een voorbeeld van de meest voorkomende stickmodus zijn:
|
Mode: |
Linker - stick |
Rechter -stick |
Schuif |
||
|
voor/achter |
links/rechts |
voor/achter |
links/rechts |
Govenor |
|
|
1 |
Nick |
Staart |
Gas/Pitch |
Roll |
Gas |
|
2 |
Gas/Pitch |
Staart |
Nick |
Roll |
Gas |
|
3 |
Nick |
Roll |
Gas/Pitch |
Staart |
Gas |
|
4 |
Gas/Pitch |
Roll |
Nick |
Staart |
Gas |



Je ziet hier dat b.v. bij stickmode 2 de rotorsturing (nick en roll) met de rechter hand bediend wordt en de staart beweging en pitch (hoog-laag) met de linker hand.
Een schematisch voorbeeld overzicht van hoe
alle onderdelen hier aangesloten kunnen zitten:
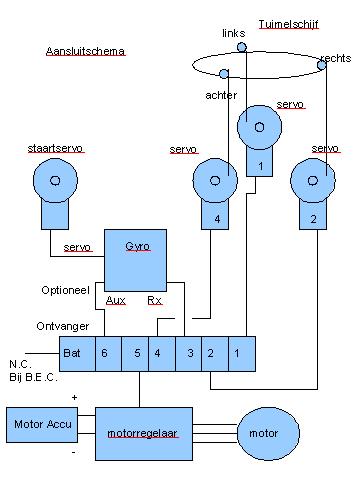 Functie van de ontvanger:
Functie van de ontvanger:
De ontvanger pikt het door de zender uitgezonden elektrische signaal op splitst dit weer op voor de verschillende "kanalen" c.q. stuurbewegingen en geeft deze weer door aan servo's.
Wil men dus dat alle kanalen op de zender benut worden, moeten er op de ontvanger dus minstens zoveel servo uitgangen aanwezig zijn.
Functie van de servo:
De servo zet het door de ontvanger aan geboden stuursignaal om in een mechanische beweging welke dan gekoppeld kan worden aan een stuurfunctie op de helikopter.
In deze heli worden er vier servo's gebruikt voor de heli te besturen n.l. een voor de staart te besturen en drie voor de hoofdrotor bewegingen te besturen.
Ook wordt op een van de servo uitgangen van de ontvanger de motorregelaar rechtstreeks aan gesloten voor het regelen van de elektromotor.
Functie van de accu:
De accu dient voor de stroom voorziening van de elektromotor en soms afhankelijk van het type motorregelaar en grote van de accu ook voor de stoom voorziening van ontvanger, servo's en gyro.
Als dit laatste het geval is heb je een motorregelaar die voorzien is van een z.g. BEC Battery Elimination Circuit) later hieroven meer.
De accu bestaat uit een aantal aan elkaar gekoppelde cellen van nominaal 1.2 Volt per cel bij het gebruik van een Nikkel Cadmium of Nikkel Metaal Hydride accu.
Bij een Litium Polymeer accu komt de cel spanning op 3.7 Volt nominaal.
Het aantal cellen achter elkaar geschakeld bepaald de totaal spanning van de accu.
De hoeveelheid stroom die de accu kan leveren wordt uitgedrukt in mili ampere per uur (mAh) of ampère per uur (Ah) (1 Ampère is 1000 mA) dit is de maximale stroom die de accu gedurende 1 uur lang kan leveren.
Soms wordt er ook nog een aparte ontvanger accu geplaatst als er geen spanningsomzetting plaats vindt van de hogere motorspanning accu naar de lagere ontvanger accu spanning.
Dit gebeurd meestal d.m.v. een z.g. BEC (voor uitleg zie motorregelaar) .br /
Tevens wordt de plaats van de accu(s) ook zo gekozen dat zwaartepunt (balanspunt) van de heli op de juiste plaats komt te liggen.
Dit is het punt waarin als je de heli bij de hoofdrotor optilt hij horizontaal komt te hangen.
Wijkt dit te veel af wil de heli de kant opgaan waar hij het zwaarst is.
Functie van de electromotor:

De electromotor zorgt voor de aandrijving van de hoofdrotor en staartrotor.
In hoofd groepen zijn er twee type verkrijgbaar met en zonder koolborstels.
Koolborstel motoren hebben een lager rendement en een kortere levensduur omdat er veel warmte ontwikkeling plaats vind bij de stroom overdracht tussen koolborstels en collector.
De meest voorkomende problemen bij de koolborstel motoren zijn de slijtage van de koolborstels en als de motoren te warm worden ( boven ongeveer 80 graden Celsius ) gaan de permanentmagneten zijn kracht verliezen door dat het materiaal een structuur wijziging ondergaat.
Ook zijn de borstelmotoren minder nauwkeurig te regelen in toerental.
Het voordeel is dat ze goed koper zijn en met een goedkopere regelaar zijn aan te sturen.
Borstelloze motoren zijn duurder maar hebben een hoger rendement (minder warmte ontwikkeling = minder vermogens verlies) en minder slijtage (geen koolborstels ).
Een ander bijkomstig voordeel is dat het mogelijk is bij sommige regelaars te vliegen met een vast toerental welke automatisch door de regelaar vast gehouden wordt ook als de motor een groter (of minder groot ) vermogen moet leveren bij het stijgen en dalen.
Deze instelling wordt ook wel eens aangeduid als de z.g. "govenor - of Heli -mode".
Het nadeel is dat ze duurder zijn en de regelaar hiervoor ook duurder is.
Het benodigde vermogen van de motor hangt af van de grootte, het gewicht van de heli en de toepassing.
Of hij b.v. voor 3-D kunstvliegen of rustig rondvliegen gebruikt wordt zit natuurlijk verschil in.
Globaal kan gesteld worden dan het benodigde netto piek vermogen voor de heli rustig te laten rond vliegen ongeveer 0,2 Pk is per Kg (150 Watt)
Het gemiddelde vermogen ligt hier dan op ongeveer 100 Watt per Kg.
Voor kunstvluchten loopt het natuurlijk op tot globaal 0.3 tot 0.4 Pk per Kg.(220 - 300 Watt)
Het benodigde motorvermogen kan dus worden uitgerekend.
Waar zitten de beperkingen ?
Je kunt immers geen grote zware motor met een heel groot vermogen in een hele kleine heli bouwen.
Je kunt globaal stellen dat de beperkingen zitten in de verhouding tussen gewicht van de heli en rotordiameter, immers bij een te hoog gewicht en een te kleine rotordiameter wordt de rotor te zwaar belast om het gewicht te kunnen dragen.
Dit is de z.g. rotorlast of rotoroppervlakte belasting die je verkrijgt door de rotoroppervlakte te delen door het gewicht van de heli .
Een goede richtwaarde is 2.5 tot 3.5 Kg per vierkantenmeter.
Wat misschien ook handig is om te weten is de manier waarop de draairichting van zo'n motor geregeld kan worden.
Voor de borstelmotor geld dat je gewoon de twee motordraden bij de motor kan omwisselen.
Voor de borstelloze motor die drie aansluitdraden heeft is het eigenlijk net zo eenvoudig echter moet hier dan de buitenste twee draden worden verwisseld.
Functie van de motorregelaar:

De motorregelaar regelt het motorvermogen c.q. toerental van de motor.
Als de accu uit niet al te veel cellen bestaat wordt meestal gekozen voor een regelaar voorzien van een z.g. BEC (Battery Elimination Circuit) - regeling dit houd in dat niet alleen het motorvermogen door de regelaar geregeld wordt maar dat ook de stroom voorziening nodig voor de rest van elektronica zoals ontvanger, servo's e.d.
Omdat de spanning voor ontvanger e.d. terug gebracht moet worden van de maximale accuspanning naar de benodigde 5 volt is dit alleen mogelijk als het spannings verschil tussen maximum accuspanning en de 5 volt en benodigde stroom voor servo's e.d. niet te groot wordt.
Het verschil moet door de regelaar weg gewerkt worden ( vermogens dissipatie ) en kenmerkt hierdoor ook zijn beperkingen.
Er bestaan ook regelaars die met een schakelende BEC werken waarbij dit probleem electronisch wordt opgelost zoals b.v. de Jazz regelaars van Kontronik.
Bij de BEC regeling wordt het motor vermogen terug geregeld als de accu leeg dreigt te geraken, zodat er altijd nog voldoende spanning over blijft voor de besturing.
Het voordeel hiervan is dat er geen extra accu (dus extra gewicht) aanwezig hoeft te zijn voor de besturing.
Een ander type is de Opto -regelaar zonder BEC waarbij de voeding en signaal lijnen van elkaar gescheiden blijven.
De signaal overdracht vind hier plaats d.m.v. een optische koppeling.
De ontvanger en servo's bezitten een eigen accu.
De stroom voor de motor te voeden wordt uit de motoraccu gehaald.
Het voordeel hiervan is dat er nooit geen stoorsignalen kunnen worden overgedragen tussen motor(regelaar) en ontvanger.
Tevens kan afhankelijk van de grote van de ontvanger accu meer stroom geleverd worden voor servo's e.d.
Omdat het regelen van een borstelmotor heel anders geschiedt dan van een borstelloze motor bestaan hiervoor dan ook twee geheel verschillende regelaars welke ook niet omgekeerd gebruikt kunnen worden.
Meer hierover bij het aansturen van de pitch.
Functie van de staartrotor:
De staartrotor of heckrotor zorgt voor het draaien van de helikopter om zijn as, hiermee wordt dus ook de richting bepaald waar de staart naar toe wijst.
Tevens dient hij ter compensatie van het "koppel" van de hoofdrotor d.w.z. de hoofdrotor draait een kant op, door de luchtweerstand die hij ondervindt wil de romp en staart de andere kant op om dit tegen te gaan moet de staartrotor hiervoor ook een constante tegen druk leveren wil de heliestaart stil blijven staan..
De heckrotorkop zorgt voor de aansturing van de heckrotorbladen.
Door de bladen een grotere of kleinere hoek te geven gaat de heckrotor meer of minder stuwkracht leveren, waardoor de staart dan verdraait.
De aandrijving van de staartrotor zit meestal gekoppeld met de aandrijving van de hoofdrotor via een tandwiel of tandriem overbrenging.
De overbrengings verhouding bepaald dan het toerental van de staartrotor welke dus in verhouding mee gaat met het toerental van de hoofdrotor.
Voor een uitleg hoe een helie werkt zonder staartrotor verwijs ik naar de pagina "Helicopter Technieken " bij "heckcompensatie" elders op de site.
Functie van de gyro:

De gyro of gyroscoop is een extra hulpmiddel om het besturen van de staart van de heli te vergemakkelijken.
Voor een uitgebreide uitleg over de werking en eigenschappen van de gyro de volgende Link: Meer gyro infomatie
Een verkorte uitleg staat hieronder:
De eigenschappen van de gyro is ook bij de gyro die hier gebruikt wordt het zelfde als bij de grotere broers die gebruikt worden in grote vliegtuigen e.d.
Het is dus een meetinstrument wat richtingsgevoelig is.
In dit geval bezit de gyro een in en uitgang waardoor het mogelijk wordt hem automatische aansturingen te laten verrichten.
De richting waarin hij gevoelig is wordt bepaald door in welke richting hij op de heli gemonteerd wordt.
Dit is op zijn beurt weer afhankelijk van het gebruikte merk.
Afhankelijk van in welke richting hij gevoelig is zit hij bovenop of aan de zijkant gemonteerd.
Hij wordt gekoppeld tussen de staartbesturings-servo en de ontvanger.
De functie van de gyro is het opvangen van een plotselinge ongewilde staartverdraaiing door b.v. wind vlagen.
Door de gyroscopische werking wordt de staart automatisch terug gestuurd in tegengestelde richting van de plotselinge verdraaiing.
De maten van gevoeligheid van de gyro is instelbaar.
In hoofdlijnen zijn er twee soorten wat de werking betreft:
Een die wel de plotselinge bewegingen van de staart door b.v. windvlagen opvangt maar niet de richting van de oorspronkelijke stand van de staart corrigeert (normale functie) en een die ook deze functie kent en zelf in staat is om bij behoorlijke zijwind toch de staart in de oorspronkelijke richting te houden de z.g. heading-hold of heading-lock.
Bij de headinglock stand zal de gyro net zolang blijven corrigeren tot de oorspronkelijk richting van de laatste gekozen gestuurde richting weer bereikt is.
Als bij de headinglock de richting veranderd wordt door een stuursignaal van de zender,dan wordt dit dan als nieuw uitgangspunt gekozen.
Voor het leren vliegen (hoveren) is zeker deze laatste methode aan te bevelen.
Ook is in vele gevallen de gevoeligheid vanaf de zender in te stellen.
Functie van de hoofdrotor: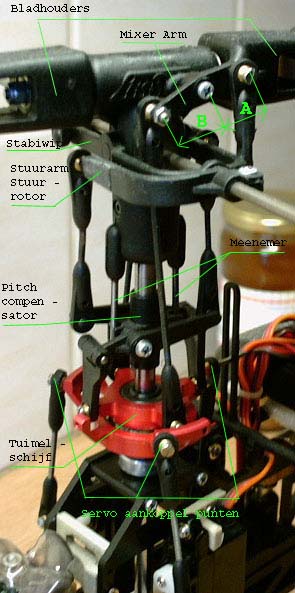
Het mechaniek waar de hoofdrotorbladen in geschroefd zitten vormen samen met de stuurrotor de hoofdrotorkop.
De hoofdrotorbladen leveren uiteindelijk tijdens het roteren de draagkracht voor de heli.
Het toerental in combinatie met de hoek die de rotorbladen maken t.o.v. de luchtinstroom (de z.g. invalshoek) het blad profiel en blad oppervlakte zijn bepalend voor het dragend vermogen.
Voor het regelen van het dragend vermogen, het stijgen en dalen dus komen bij de modelheli in principe twee manieren voor:
-
1: Toerengeregeld met een vaste invalshoek (vaste pitch) van de rotorbladen waarbij meer toeren zorgen voor meer lift (stijgen) en minder toeren voor dalen.
Deze techniek wordt veel toegepast bij de kleine "Indoor" - helies.
-
2: Door bij een vast toerental de invalshoek van de rotorbladente verstellen waardoor meer of minder lift wordt verkregen de z.g. collectieve pitch verstelling (regeling).
De laatste manier is van toepassing bij deze heli.
Bij deze manier van regelen is het de kunst te zorgen voor een zo constand mogelijk toerental, immers als de hoek groter wordt moet de motor meer vermogen leveren (meer "gas geven") om het toerental gelijk te houden.
En bij een kleinere hoek dus het omgekeerde.
Om dit toerental vast te kunnen houden zijn er twee manieren mogelijk:
-
1: Door op de zelfde stuurknuppel beweging voor de invalshoek (pitch) aansturing ook een "gas" regeling te programeren waardoor op een gedeelte van de stuurknuppel beweging meer gas gegeven wordt dan op een ander gedeelte van de stuurknuppel beweging (de z.g. gas-curve).
-
2: Door de motorregelaar dit automatisch te laten doen.
Deze manier van regelen kan geschieden bij een borstelloze motor met een z.g. "Heli" of "Govenor" regeling waarbij de frequentie van het aansturen van de motorwikkelingen het toerental bepalen.
Hoe werkt zo'n rotor nu eigenlijk?
In tegenstelling met wat sommige denken zijn de rotorbladen niet echt vast geschroefd maar zitten zo vast in de bladhouders dat ze zich nog kunnen richten door de centrifugaal kracht die ontstaat tijdens het roteren.
Als dit niet zo zou zijn zo de heli in sterk onbalans geraken omdat de optredende verschillen in krachten vanuit het middelpunt naar buiten gericht die ontstaan door meerdere oorzaken elkaar niet kunnen opheffen
De centrifugaal krachten die door het roteren optreden kunnen erg hoog oplopen.
De factoren die hier bij meespelen zijn in hoofdzaak het toerental van de rotor, het gewicht van de rotorbladen en de positie van het gemiddelde zwaartepunt in het rotorblad.
Met deze drie gegevens is de kracht uit te rekenen waarmee aan de bladhouders getrokken wordt.
Als U de invloeden van deze drie gegevens duidelijker wilt zien kunt U een gratis stukje software downloaden in de software rubriek.
Ook de as die door de bladhouders en het middenstuk zit heeft geen starre bevestiging in het middenstuk maar is op gesloten in in rubbers (z,g buffers) zodat er min of meer een beweging mogelijk is binnen in het centraal middenstuk waardoor de rotor instaat is zich te richten door de centrifugaalkracht en eventuele kleine mechanische afwijkingen te compenseren en tevens toch een bepaalde bewegingsvrijheid te handhaven.
Waarom draait een heli tijdens een voorwaartse vlucht niet op zijn kant ? (rol beweging)
Voor de doordenkers gaan we nog wat dieper in op de bewegings vrijheden van de rotor.
Als nu de heli een voorwaartse vliegbeweging maakt moeten de bladen zich anders kunnen gedragen.
Immers de rotor draait rond iets wat betekend dat bij een voorwaartse snelheid het ene rotorblad wat zich tegen de wind in beweegt meer lift zou krijgen door de hogere luchtsnelheid dan het blad wat zich van de wind af beweegt wat een lagere luchtsnelheid ondervindt.
Je zou denken dat dit effect dan zou resulteren in een zijwaartse kantelbeweging van de heli een rolbeweging dus.
Om dit nu te verduidelijken heb ik een ander tekeningentje toegevoegd en zal er wat uitleg bij geven.
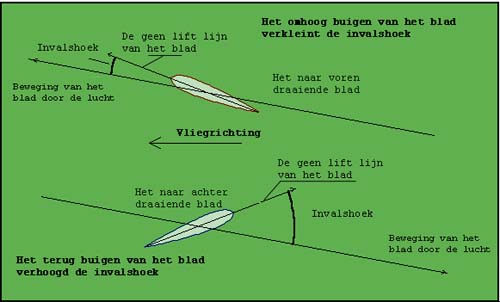 De rotorbladen moeten ook met een bepaalde vrijheid omhoog en omlaag kunnen bewegen. Ook zit er nog een bepaalde doorbuiging in het blad (lees stijfheid), waardoor de beweging mogelijk is.
De rotorbladen moeten ook met een bepaalde vrijheid omhoog en omlaag kunnen bewegen. Ook zit er nog een bepaalde doorbuiging in het blad (lees stijfheid), waardoor de beweging mogelijk is.
Krijgt het naar voren bewegend blad nu meer luchtweerstand zal het ook naar boven buigen en draaien het geen weer resulteert in een kleinere invalshoek met minder lift.
Bij het naar achter bewegend blad is het effect omgekeerd en veroorzaakt weer vermindering van lift.
Het is dus een soort "flappende" beweging die ontstaat met de frequentie van het toerental.
Hieruit kunt U tevens zien dat de bewegingsvrijheid die de rotor moet bezitten erg belangrijk zijn voor een goed vliegende heli.
Dus zowel de verdraaiing naar voor en achteren als omhoog en omlaag moet mogelijk zijn.
Een tweede effect:
Laten we nu eens kijken naar wat er gebeurd als de heli voorwaarts moet gaan vliegen.Als eerste kantelt bij het aansturen de tuimelschijf naar voren waardoor (bij een rechtsom draaiende rotor) het linker rotorblad een kleinere invalshoek krijgt dan het rechter rotorblad.
Het gevolg is dat rechts meer lift gecreëerd wordt dan links.
Dit effect is pas na 90 graden verdraaiing merkbaar waardoor de heli naar voren gaat hellen en dus naar voren gaat vliegen omdat er dan meer lift aan de achterkant ontstaat i.p.v. aan de rechterkant.
Wat verder op de pagina wordt op het 90 graden effect wat verder op in gegaan.
Door de voorwaartse snelheid die dan plaats gaat vinden wordt de luchtsnelheid over het linker tegen de wind in bewegend blad groter dan het rechterblad wat zich van de wind af beweegt.
Hierdoor krijgt dus het linkerblad weer wat meer lift en het rechterblad weer wat minder waardoor de heli zich min of meer gaat terug kantelen, het z.g. "opbomen" van de heli.
Dit heeft dan ten gevolge dat het aansturen naar voor (nick) wat meer moet worden en de hoogte (pitch) wat moet worden verminderd om de heli toch verder rechtdoor naar voren te laten vliegen.
Hoe hoger de voorwaartse snelheid hoe erger dit effect is.
Het lijkt misschien dat de rotor op dat moment minder lift behoeft te leveren omdat de pitch aansturing verminderd maar de heli blijft toch zijn zelfde gewicht behouden en dus is de te leveren liftkracht door de rotor nog steeds even groot.
De tuimelschijf:
Om de pitch te kunnen verstellen is een z.g. tuimelschijfgemonteerd, deze bestaat uit een draaiend gedeelte het geen met de rotormast mee draait en via een kogellager een stilstaand gedeelte waaraan drie servo's zijn gemonteerd.
Het geheel kan omhoog en omlaag schuiven over de rotoras. In het bovenste gedeelte is een kogelscharnier verwerkt zodat de tuimelschijf ook nog eens kan kantelen (tuimelen).
Deze tuimelschijf zit via een hefboompje verbonden met de rotorbladen zodat bij het omhoog of omlaag bewegen van de tuimelschijf de hoek van de rotorbladen verdraaien en waardoor deze dus tijdens het roteren meer of minder lift produceren.
Omdat onder het stilstaande gedeelte van de schijf de drie servo's mooi verdeeld om de 120 graden gemonteerd zitten, kan door het combineren van de servobewegingen de schijf vrijwel alle bewegingen maken, dus gelijktijdig omhoog of omlaag of kantelen naar voor of achter of links of rechts kantelen.
Als de schijf naar voren kantelt krijgen de bladen dus als ze achter zijn een grotere hoek en als zo voor zijn een kleinere op deze manier wordt dus de heli achter op getild en zal hij dus naar voren vliegen.
Door de schijf dus te kantelen kan hij dus alle kanten op vliegen en door ze gelijktijdig omhoog of omlaag te bewegen stijgen of dalen
De bewegingen van de servo's worden in de zender software berekend en zijn dus indirect afhankelijk van de knuppelbewegingen op de zender.
De stuurrotor:
De stuurrotor (soms hulprotor genaamd) heeft tot doel het sturen te vergemakkelijken en wordt meestal gebruikt bij niet al te grote helicoptermodellen.
Bij grotere heli's is omdat de rotor ook groter is de eigenstabiliteit (het gyroscopische effect) ook groter en wordt de behoeften naar extra stabiliteit dus ook minder.
Paddels:
De paddels die op de stuurrotor gemonteerd zitten hebben een symmetrisch profiel en een invalshoek van nul graden op het moment dat er geen aansturing plaats vindt .
Het gewicht van de paddels veroorzaken een stabiliserend (gyroscopisch) effect geeft en zijn daardoor moeilijk uit zijn baan te brengen
Bij zware paddels wordt het kantelen van de paddelstang tegengewerkt door de centrifugaalkrachten die er op werken omdat de paddel in zijn oorspronkelijke baan wil blijven draaien waardoor het effect van stuurbewegingen afneemt.
Wat je hier uit kunt concluderen is dat het gewicht van de paddels dus mee doen op het gyroscopische effect.
Hoe zwaarder de paddel hoe sterker het stabiliserende effect omdat de centrifugaalkracht groter wordt.
Dit heeft tot gevolg een langzamere reactietijd op het stuurcommando
Minder gewicht van de paddels geeft dus een fellere stuurreactie met minder eigenstabiliteit.
Voor beginners wordt meestal een niet al te felle reactie aanbevolen om het gevaar van oversturing te verminderen.
Het mixer hefboompje of z.g. Bell-Hiller-armpje:
Van het mixer armpje zit het draaipunt gemonteerd op de arm van de bladhouder (zie foto).
Aan een kant (op foto kant B) van het mixer armpje zit de rechtstreekse aansturing van de tuimelschijf.
Door de stuurrotor te koppelen aan de andere zijde van het mixer hefboompje(op foto kant A) waar dus ook de rotorbladen mee verbonden zitten (welke zelf ook een gyroscopisch effect bezitten) heeft het geheel dus invloed op de aansturing van de rotorbladen.
De afstanden ( A en B) tussen de aankoppelpunten op het hefboompje (mixer hefboom) bepalen dus de hoeveelheid (mix) invloed van de stuurrotor en de invloed van de hoeveelheid rechtstreekse aansturing van de rotorbladen< door de tuimelschijf.
De aansturing:
Hoe het geheel nu tijdens het aansturen (bij een draaiende rotor) in zijn werk gaat is misschien iets moeilijker te begrijpen.
Dit komt hoofdzakelijk omdat het effect van de aansturingen 90 graden later (na 1/4 rotoromwenteling)pas effectief merkbaar is en ijlt dus na wat al eerder op deze pagina ter spake is gekomen.
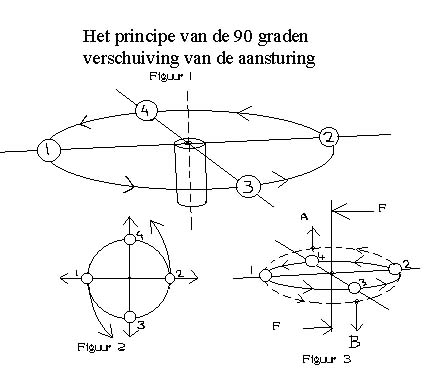 Om je een voorstelling te hiervan te kunnen vormen kan je dit vergelijken met een roterend kruis met 4 even zware bollen van een redelijk gewicht.
Om je een voorstelling te hiervan te kunnen vormen kan je dit vergelijken met een roterend kruis met 4 even zware bollen van een redelijk gewicht.
(Links of rechtsom draait maakt voor de werking niet uit.)
Als deze bollen roteren wordt door de centrifugaalkracht de rotor in evenwicht gehouden en is door het gewicht van de bollen ook moeilijk uit zijn baan te brengen (figuur 1).
Dit is gebaseerd op de traagheidswet.
De traagheidswet is de eerste wet van Newton: Een deeltje blijft in rust of het beweegt met constante snelheid zolang er geen externe krachten op werken
Gaan we nu een kleine kracht uit oefenen om de as van de rotor te kantelen ( kracht F van figuur 3) dan wordt de baan van de bollen 1 en 2 in lichte mate verstoord waardoor de bollen 1 en 2 uit zijn oorspronkelijke baan raken (figuur 2 en 3).
Door de massatraagheid van de bollen samen met de werkende centrifugaal krachten op de bollen wordt dit versterkt tot 90 graden verschoven van het punt waar de aansturing plaats vond (punt A en B).
Op deze manier is het dus mogelijk met een betrekkelijk kleine kracht omdat de bollen alleen maar uit hun baan gebracht hoeven te worden de rotor waarin zich grote centrifugaalkrachten bevinden toch te kunnen maar komt het effect hiervan pas 90 graden (1/4 omwenteling) verdraaid later.
De rotor kantelt dan dus richting punt A en B.
Dit verhaal geld zowel voor de stuurrotor als voor de rotorbladen.
Een voorbeeld:
Stel de heli vliegt in een positie waarbij een rotorblad naar voren wijst en een naar achter (dus).
Stel dat je de tuimelschijf naar voren kantelt dan maken de paddels dus ook een hoek naar voren waardoor (bij een rechtsom draaiende rotor) de rechter paddel een positieve hoek krijgt en de linker paddel een negatieve, echter het effect hiervan is pas na 90 graden waardoor de stuurrotor dus achter omhoog gaat en voor omlaag.
Na deze 90 graden verdraaiing staan de rotorbladen dus links en rechts en krijgen op dit moment een positieve en negatieve hoek het geen 90 graden later pas effectief wordt en zal de heli dus naar voren gaan vliegen enz..
Dit blijft zich dus herhalen tot de tuimelschijf in een andere stand gezet wordt.
Deze manier van de rotor aansturen geld dus in alle richtingen.
Het is natuurlijk niet zo dat de bladen in een keer omklappen in de boven vernoemde standen, dat gebeurd dus geleidelijk aan omdat de afgelegde weg over de tuimelschijf per graden verdraaiing een andere hoek veroorzaakt op de bladen van zowel de stuurrotor als de rotorbladen.
Deze manier van aansturen wordt ook wel een periodieke blad verstelling genoemd omdat per positie (periode) of graden verdraaiing het blad een andere stand krijgt.
Verdere meer uitgebreide informatie over toegepaste hoofdrotortechniek kunt U vinden op de hoofdrotor pagina in de rubriek Helicopter Technieken.
De pitchcompensator:
Omdat het geven van meer pitch de stand (invalshoeken) van de paddels t.o.v. elkaar niet mag beïnvloeden wordt tussen tuimelschijf en rotorkop een z.g. pitchcompensator gebruik die dus wel een kanteling van de stuurrotor kan bewerkstelligen maar geen invloed heeft op de paddelstanden t.o.v. elkaar.
Op deze manier is dus de stuurrotor aan te sturen zonder dat deze een lift van de heli veroorzaakt en blijft dus alleen een stabiliserend en sturend effect veroorzaken zonder de lift te beïnvloeden.
Omdat deze pitchcompensator wel in hoogte over de as moet kunnen verschuiven maar niet mag verdraaien t.o.v. de kop (as) is een z.g. meenemer opgenomen in het geheel welke dus zorgt voor een geleiding zonder verdraaiing over de as.
Het afstellen van een modelheli is afhankelijk van merk en type.
Elders op de site komt U verschillende heli's tegen waar ook verder wordt ingegaan op de afstellingen hiervan.
Zou U graag iets toegevoegd willen zien op deze pagina wat na het lezen van deze pagina nog niet duidelijk is ?
Hebt U vragen welke hierop betrekking hebben kunt U mailen naar het onderstaande mailadres.
En denk er aan "Domme vragen bestaan niet", domme antwoorden wel en mensen die alles weten lezen deze pagina niet.
De pagina is juist bedoeld voor diegene die er (nog) weinig kennis van hebben.
Voor een verdere technische informatie m.b.t. de toegepaste technieken zie de pagina "Helicopter Technieken" elders op de site
 |
zelf lipo packs maken |  |
kokam packs maken |
Alles wat je moet weten over electro modelhelicopter Klik hier Auteur: Peter J.J. van Hout
 Lithium Polymeer accu's
Lithium Polymeer accu's 
Het aanschaffen van een Lithium Polymeer accu pakket of kort gezegd een Lipo pakket.
| Als je een Lipo -accu pakket koopt is het belangrijk te weten of hij bij de aanschaf aan je eisen voldoet. Welke eisen dit zijn moet je van tevoren bepalen. Wat je minimaal moet weten is de totale accuspanning (Volts) die het pakket moet leveren, welke constante (langdurig) stromen (Ampère) en welke piek (kort durende) stromen het pakket moet kunnen leveren. Dit is dus afhankelijk van het vermogen wat de motor en eventuele electronica (stroom en spanning) moet kunnen leveren. De stroom die de accu kan leveren wordt meestal opgegeven in mili ampère (1000 mA = 1 Ampère). Afhankelijk van waar je de accu voor gaat gebruiken moet hij dus een bepaalde stroom (Ampère) bij een bepaalde spanning (Volt) kunnen leveren. |
De tijdsduur dat de accu dit vol kan houden is de capaciteit van de accu en wordt vermeld in mili Ampère gedurende een uur (h van het engelse hour) lang. Is de stroom dus hoger dan de vermelde capaciteit, dan wordt de tijdsduur dus korter, zoals b.v. de dubbele stroom in de helft van de tijd. Wat de accu kan presteren staat vermeld in de technische gegevens die de fabrikant aanlevert of op de accu zelf en moet je deze dus dan ook voordat je iets aanschaft bekijken of deze voldoende zijn. |
|
| De lipo cel en zijn eigenschappen: |
||
| De lipo cel heeft t.o.v. bijvoorbeeld een NiMh of Nicad cel een hogere spanning. De nominale (gemiddelde) spanning waar normaal vanuit gegaan wordt om voldoende spanning te hebben voor een bepaalde toepassing bedraagt 3,7 Volt. De maximale spanning die de cel mag hebben bedraagt 4,2 Volt. De minimale spanning voordat de cel stuk gaat is 2,5 Volt, en zal het |
dus duidelijk zijn dat de spanning hier dus nooit onder mag komen omdat de schade hierdoor onomkeerbaar is. Hierbij is dus het spanning gebied waar binnen de cel zijn werking kan doen bepaald. Door zijn lage gewicht is de cel uitermate geschikt voor het modelvliegen mits de kritische grenzen waarbinnen de cel zijn werk doet goed bewaakt blijven. |
|
| Meerdere cellen bij elkaar (in een pakket): |
||
Een lipo pakket bestaat uit meerdere lipo cellen.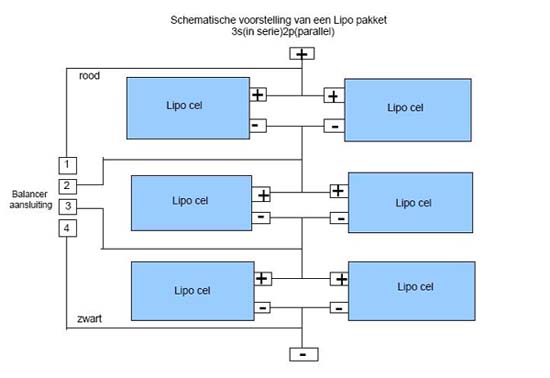 Door een aantal cellen achter elkaar in serie te zetten ( de plus van de ene cel wordt verbonden met de min van de volgende cel ) kan de spanning worden opgevoerd. Je kan dan dus gewoon de spanning optellen. Je ziet in het voorbeeld hier 3s staan wat betekend dat er 3 cellen in serie (achter elkaar)) geschakeld zijn wat dus betekend een spanning van 3 x 3,7 Volt is dus 11,1 Volt nominale spanning. De spanning van dit pakket zou dan dus kunnen variëren bij een vol geladen pakket van maximaal 3x 4.2 = 12.6 Volt tot een minimale spanning (let op !! gemeten in maximale belaste toestand) tijdens het vliegen van 7.5 Volt **. |
** Tot die 7.5 Volt mag de accu dus niet komen omdat het risico erg groot is dat de accu stuk gaat. Als veilige grens wordt meestal in dit geval zo'n 9 Volt (3 Volt per cel) gekozen (zie ook opmerking bij "Het maximaal ontladen van een lipo pakket") Let op !! Het in serie schakelen van cellen van ongelijke capaciteit (aantal mAh) leid ook onherroepelijk tot problemen !! Dit komt omdat tijdens het ontladen de cel van de laagste capaciteit eerder leeg is dan de rest en hierdoor dan onder de mimimaal toelaatbare spanning komt. De stroom die de accu moet kunnen leveren kan worden opgevoerd door cellen parallel aan elkaar te schakelen (zie schema). Door b.v. 2 cellen van 1000 mAh de plussen aan elkaar te verbinden en de minnen aan elkaar te verbinden krijg je de zelfde spanning 3,7 Volt met een dubbele capaciteit, 2000 mAh dus. Je mag dan deze twee parallel geschakelde cellen beschouwen als een cel met de dubbele capaciteit. Zo'n trucje komt soms ook voor bij de pakketten en dit kan je ook zien op de aanduiding. Dit wordt dus gedaan om de juiste spanning met voldoende capaciteit te creëren. In dat geval komt er een p (van parallel) toevoeging bij, b.v. 3s2p. 3s2p betekend dan 3 cellen achter elkaar van telkens 2 parallelle cellen en dus totaal 3 x 2 = 6 cellen bevat. Als 1 cel een capaciteit van 1000 mAh zou hebben, dan zou de dus in het gebruikte voorbeeld een pakket krijgen van 11,1 Volt met een capaciteit van 2000 mAh. Door alle plussen en minnen gescheiden via draden naar een balancer connector buiten het pakket te brengen, is dan elke cel los van elkaar van buiten het pakket af te benaderen om een gelijke lading in elke cel te verkrijgen. |
|
| De aanduidingen op een Lipo pakket: |
||
Wat o.a. op het pakket staat is de nominale spanning van de accu in Volt die het pakket kan leveren. |
De aanduiding van b.v. 25C op een 2500 mAh pakket betekend dus een ontlaad stroom van 25 x 2.5 Ampère = 62.5 Ampère. Wat verder ook meestal wordt opgegeven is de constante (Continuous) ontlaad stroom in Ampère (of aantal x C) die de accu langdurig kan leveren en welke piek (Climb outs) stromen het pakket gedurende korte tijden kan leveren zonder stuk te gaan. Soms staat ook vermeldt bij welke kortstondige belasting de accu het begeeft (Max Bursts). Het zal duidelijk zijn dat dat het laatste nooit mag gebeuren. Het beste kan uit gegaan worden van de opgegeven continu ontlaad stroom voor het doel je hem gaat gebruiken. Als je zorgt dat de maximale piek belasting die de accu kan leveren bij normaal gebruik niet of nauwelijks boven de continu ontlaad stroom uit komt heb je de minste problemen. Voor het laden geld iets anders. Bijna altijd wordt de maximale laadstroom waarmee de accu geladen mag worden op het pakket vermeld. Het is erg raadzaam om hier niet boven te gaan omdat dit verstrekkende gevolgen kan hebben t.a.v. de levensduur van de accu en de veiligheid (explosie gevaar) Meestal is dit 1 x C, dus een maximale laadstroom die gelijk is aan de capaciteit van de accu. Een lagere laadstroom mag natuurlijk ook al duurt het dan natuurlijk lager voordat de accu geladen is maar vergroot meestal wel de levensduur van de accu. |
|
| De technische specificatie van de fabrikant: | ||
| De test gegevens. Soms worden door de fabrikant test gegevens verstrekt waaronder de cel getest is. Meestal is dit in de vorm van een grafiek. Wat je b.v. uit deze grafiek kan halen is hoe de cel zich gaat gedragen bij een bepaalde belasting (hoeveelheid stroom die er uit getrokken wordt). In de onderstaande grafiek zie je verschillend gekleurde lijnen uit gezet waarvan elke kleur een bepaalde belasting voorstelt. Je ziet dat naarmate de belasting hoger wordt, de spanning verder in elkaar zakt. Wil je dus voldoende spanning overhouden om alles goed te laten werken moet je hier dus rekening mee houden. Ook zie dat als de accu bijna leeg de spanning plots erg snel terug loopt en het risico van te diep ontladen waardoor de accu stuk gaat sterk aanwezig is. Het onderstaande grafiekje is de weergave van 1 enkele cel en moet de vermenigvuldigt worden met het aantal in serie staande cellen in het pakket. |
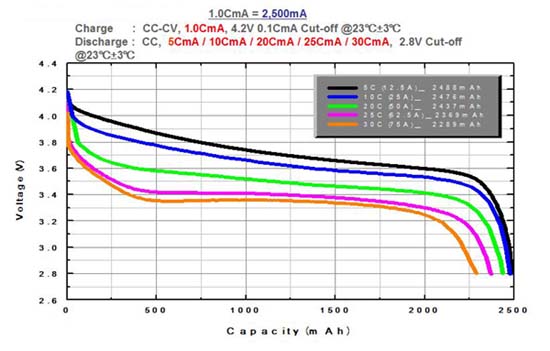 |
|
| De meest gebruikte manieren van laden: |
||
| 1:Snel laden. Hieronder verstaan we het laden van de accu met een laadstroom van meer dan 1 x de accu capaciteit (1 C) tot de maximale toegestane stroom als opgegeven door de fabrikant. (De maximale laadstroom staat ook vermeld op de accucel of het accu pakket zelf.) Dus b.v. een 4000 mA accu laden met meer dan 4 Ampère tot de opgegeven maximale stroom. 2:Versnelt laden. Het laden met meer dan 0.1 maal de accu capaciteit (0,1 C) tot 1 x de accu capaciteit (1 C). |
3:Normaal laden of ook wel langzaam laden genoemd. Het laden met 0.1 C of minder dan 0.1 maal de accu capaciteit) In tegenstelling tot andere type accu's komt een z.g. druppel lading door een lader die de accu op spanning houd bij de lipo niet voor. Zou de lader zelfs met een kleine stroom door blijven laden dan gaat de lipo stuk. Hierdoor is het dus noodzakelijk dat de lader ook daadwerkelijk het laadproces onderbreekt bij het bereiken van de maximale spanning. |
|
| Het laden van een enkele Lipo cel: | ||
| Het laadproces. In vergelijking met NiCad en NiMH cellen zijn Lipo cellen veel kritischer bij het laden. Zoals al eerder vermeld mag de maximale spanning die de cel mag hebben 4,21 Volt zijn, hierboven gaat het mis. Het laadproces gebeurd daardoor dan ook meestal met een ingestelde laadstroom die zeker niet hoger is als voor de cel opgegeven wordt. Hierbij zal de laadstroom afnemen als de maximale spanning die de cel mag hebben bereikt is. Als op dat moment bij het bereiken van de maximale spanning het procesabrupt onderbroken zou worden en je zou dan na het loskoppelen de celspanning meten zou je constateren dat de spanning lager is dan die maximale spanning die de lader over de cel had staan.. Dit komt door de inwendige weerstand van de cel die omdat er een stroom loopt de spanning wat verhoogt. Om die reden laad de lader dan ook na het bereiken van de maximale spanning wat door, zei het wel met een aangepaste laadstroom diedus danig hoog is dat de maximale spanning niet overschreden wordt. Hierdoor ontstaat een afbouwende stroom zoals in de laadgrafiek zichtbaar is. Uiteindelijk zal dan het laadproces geheel stoppen als hij op 4,2 Volt zit en er geen stroom meer toegevoegd kan worden zonder dat de cel een overspanning krijgt. |
Het zal duidelijk zijn dat de laadtechniek dus geheel anders is dan bij de NiCad en NiMH cellen. Met name de detectie methode die het uitschakelen van het laadproces bepaald, gebeurd hier dus niet met een piekdetectie maar d.m.v. het constant bepalen van de spanning per cel en het terug regelen van de laadstroom als dit punt bereikt is. Een nauwkeurige meetmethode hierbij is dus erg belangrijk. |
|
| De problemen die ontstaan bij het in serie laden van Lipo cellen: |
||
| Bij het in serie laden van lipo cellen is het van levensbelang voor de cellen dat spanning per cel niet te hoog wordt en daardoor een of meerdere cellen overladen worden. Omdat de lader aangesloten wordt op de totale accu spanning van het pakket kan op deze manier alleen de totale toegestane spanning van alle cellen ingesteld worden op de lader.
Dit zelfde geld ook voor de maximale laadstroom (vaak 1C) die er mag lopen door de cellen in het pakket. |
Dit meestal losse apparaat wat dus naast de lader gebruikt wordt, heeft tot doel de laadstroom van de cel die vol is om te leiden door de balancer i.p.v. door de volle lipo cel.
|
|
| Het maximaal ontladen van een lipo pakket: |
||
| Tijdens het gebruik (ontladen) van het pakket mag de maximale ontlaadstroom nooit groter zijn dan de opgegeven waarde. Het beste kan er een stuk onder gebleven worden om de levensduur van het pakket te bevorderen. Ook mag van geen enkele cel in het pakket de spanning in belaste (en onbelaste) toestand lager worden dan 2.5 Volt. Gebeurd dit wel dan is de kans groot dat de cellen stuk gaan of zelfs spontaan in brandvliegen. Het is beter een veilige marge hiervoor te kiezen van b.v. 3.0 Volt of hoger om problemen te voorkomen. |
Om dit probleem beter in de hand te houden bestaan er wat elektronische hulpmiddelen die het onder spanning probleem detecteren en de stroom afname in het pakket terug regelen. Afhankelijk van het gebruik van het pakket is het raadzaam om de vakhandel hiervoor te raadplegen. Een veelvuldige toepassing hiervan is een spanningsdetectie in een motorregelaar. Hierbij kan de afslag per cel worden ingesteld op b.v. 3 Volt. Meestal wordt hierbij dan gekeken naar de totaal gemeten spanning van het pakket. |
|
| Problemen die ontstaan tijdens het ontladen (leeg vliegen): |
||
| Bij het ontladen (leeg vliegen) moet je beseffen dat naarmate het cellen pakket uit meer cellen bestaat de afslag minder betrouwbaar wordt. Dit is omdat het verschil tussen een lege (3 Volt) cel en een volle (4.2 Volt) 1.2 Volt is en naarmate er meer cellen in een pakket zitten de kans ook toeneemt dat er eentje of meerder tussen zitten die wat minder zijn. Hierdoor wordt het detecteren van wanneer de slechtste cel in het pakket op minimale spanning komt moeilijker. Dit betekend als er een slechtere cel tussen zit met minder capaciteit deze wel eens onder de toegestane minimale spanning zou kunnen komen met alle gevolgen van dien. Het zou zelfs kunnen gebeuren dat het aantal cellen op die manier bij het inschakelen niet goed gedetecteerd wordt en er een verkeerde terug regelspanning ingesteld wordt. |
Dit kan echter alleen gebeuren als een van de cellen erg slecht is ofniet (meer) kan voldoen aan de stroom die geleverd moet worden. Dit is dan ook de oorzaak waarom vele het pakket maar zo'n 80 % leegvliegen om dit risico te vermijden. Als je dit doet (80% leegvliegen) kan het dus nog steeds zijn dat de slechtste cel misschien wel 90% leeg is. Ook het niet geheel leeg vliegen heeft tot gevolg dat een langere levensduur verkregen wordt. Een optie om dit te voorkomen is een Lipo- save detectie die ook daadwerkelijk via de balancer aansluiting elke cel spanning afzonderlijk in de gaten houd tijdens het vliegen. Is de belastbaarheid (maximale ontlaadstroom) van het pakket onvoldoende voor het beoogde doel dan wordt de accu ook te zwaar belast en zal de celspanning in belaste toestand dalen tot onder het toegestane minimale niveau en gaat de accu dus ook stuk. |
|
| Het samenstellen van een Lipo accu pakket: |
||
| Bij het samenstellen van het pakket worden zo goed mogelijk gebruik gemaakt van cellen die de zelfde capaciteit hebben. Hoe groter de onderlinge verschillen tussen de cellen, hoe eerder er problemen ontstaan. De onderlinge verschillen tussen de cellen zijn echter nooit zo klein dat de problemen die ontstaan bij laden en ontladen hierdoor opgevangen kunnen worden. Indien je van plan bent om zelf van afzonderlijke lipo-cellen één pack te maken, is het belangrijk dat je alvorens de cellen te solderen ze eerst 'op elkaar afstemt' door ze afzonderlijk te laden en pas dan samen te voegen tot één pack. |
Bij het parallel samenvoegen zal er als er een onderling spanningsverschil is tussen de samen te voegen cellen, een stroom gaan lopen van de ene cel naar de andere tot de spanning van beide cellen gelijk zijn. Is het spanningsverschil te groot door dat b.v. de ene cel leeg is en de andere vol, zal er tijdelijk te veel stroom gaan lopen en gaat de cel stuk. Dit zelfde verschijnsel krijg je ook als je twee afzonderlijke pakketten parallel gaat zetten om de stroom (capaciteit) te verhogen. De onderlinge spanningsverschillen tussen de pakketten moeten dus zo klein mogelijk zijn op het moment van aan elkaar pluggen. |
|
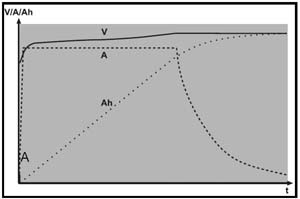



De levensduur van een Lipo accu pakket:
Kort samen gevat kunnen we stellen dat de volgende punten hebben invloed op de levensduur van het accu pakket:
1: Detoegepaste laad methode
2: De laad en ontlaadstromen.
3: Blootstellen aan overladen of een te diepe ontlading.
4: Temperatuur tijdens laden en ontladen.
5: Het aantal laad en ontlaad cycli.
6: Bewaar omstandigheden.
Let op !!
De tekst over het onderwerp op deze pagina is met de grootst mogelijke zorg gekozen.
De kennis m.b.t. dit onderwerp is een samenvoeging van fabrikant gegevens en eigen meetgegevens c.q. ervaringen.
Desondanks kan het mogelijk zijn dat de pagina onjuistheden of type fouten bevat.
Ook het interpreteren van de tekst kan misschien op meerdere manieren waardoor er misverstanden kunnen ontstaan over het gebruik van de accucel.
Het gebruik van de op deze pagina aangeboden informatie kan leiden tot schade aan accu's indien dit zo is.
De auteur is door het duidelijk vermelden van dit gegeven derhalve dan ook niet aansprakelijk hiervoor.
Het naleven van het vermelde en het interpreteren hiervan is dan ook voor eigen risico.
De reden waarom ik deze pagina ondanks het bovenvermelde toch wil aanbieden is dan ook dat ik teveel schade aan deze accu's zie ontstaan door onwetendheid en ondeskundig gebruik en hoop op deze manier dit te kunnen verminderen.
Auteur: Peter J.J. van Hout